

小型でしなやかに動く子ども型ロボット「Affetto(アフェット)」の基本骨格を開発
リアリティを追及した赤ちゃんアンドロイド完成に前進
本研究成果のポイント
・小型ながらしなやかに動作可能な関節を数多く備える子ども型ロボット「Affetto(アフェット)」の基本骨格部分を開発。
・外部からの力を柔らかく吸収する関節設計を実現し、多数の動作機構をコンパクトに実装したことで、多様な姿勢の表現が可能。従来のものよりも、骨格機構の信頼性としなやかさが向上。
・今後、さらなる動作安定化や人様皮膚の実装を通じて、子どものように親密に触れ合えるアンドロイドの実現に期待。
概要
大阪大学大学院工学研究科の石原尚助教および浅田稔教授を中心とする研究チームは、子どものように親密に触れ合えるロボットを目指して、小型でしなやかに動作可能な子ども型ロボットの基本骨格部分の設計・開発を行いました。柔らかくしなやかな動作を実現するために、空気圧駆動方式を採用し、外から加わる力が効率よく内部の空気に伝わるように設計しました。また、直線的に動作するリニアアクチュエータ と回転型アクチュエータを体の場所に応じて適切に使い分けることで、小さな体でありつつも、多数の動作機構を備えさせることに成功しています。これまでに実施したいくつかの試作機の開発を経て、骨格機構の信頼性としなやかさが向上しました。
これらの特徴により、多様な姿勢を表現することができ、かつ人と触れ合った際にも柔らかく動作することが可能です。さらに、人のような柔らかく機能的な皮膚を実装することで、子どもを相手にするように親密に触れ合うことのできる子ども型ロボット「Affetto(アフェット)」 (図1) が実現できます。
本研究の一部成果はAdvanced Robotics誌に近日掲載予定です。

図1 Affetto頭部に皮膚を実装した完成イメージ
研究の背景
浅田稔教授が中心となって推進してきた認知発達ロボティクスでは、子どもが他者を含めた周囲の環境について自ら学び賢くなっていく仕組みの仮説を立て、それをロボットに再現させて学習の過程を詳しく調べることを通じて、人の発達のより深い理解とロボットの知能化のための設計原理を見出そうとする試みを進めてきました。この目的のためには、子どもが養育者との親密な触れあいの中で豊かな経験をするように、人と親密に触れ合うことのできるロボットの実現が不可欠です。そのためにこれまでいくつかの子ども型ロボットが開発されてきましたが、サイズが大きすぎたり、動作可能な関節の数が少なかったり、また動作が固いなど、人と親密に触れ合うためには改善すべき点が多く残されていました。そこで、石原尚助教らは、身長80cmクラスの小型ロボットの関節の柔軟性の向上及び関節数と可動範囲の向上のためのロボットの基本骨格部分の設計に取り組んで来ました。今回公開する骨格部分は 図2 に示すものであり、前腕を除く頸部から下腿部までのものです。

図2 今回開発した基本骨格部分
外から加わる力を姿勢の変化によって柔らかく受け止めるために、空気圧駆動方式の採用と逆可動性を保証する設計を実施しました。空気圧で動作するアクチュエータとして採用したエアシリンダは、素早く力強い動きが可能でありながらも、動作音は静かで、また空気自体が有するバネ特性によって関節にしなやかさを与えます。このような特長は、人が直接触れ合う場合理想的です。しかし、外から身体に加わる力がバネ特性を有するエアシリンダの駆動軸を動かす力にうまく変換されなければ、そのバネ特性は発揮されず、ロボットの身体機構が破壊されるか、もしくはロボットに触れた対象に大きな反力が加わって危害を与えてしまいます。そこで、外部からの力が効率よく駆動軸を動かす力に変換される性質である逆可動性が保証されるように関節機構を設計しました。この結果、ロボットの動作中に人がその腕をとって激しく振り回したりした場合でも、ロボットの姿勢変化によってしなやかに力が受け流されます。
また、小型な身体の中にこのような関節を数多く実装するためには、人型身体の限られたスペースに可能な限り効率的に関節駆動機構を配置していくことが求められます。従来のロボットでは、回転型のアクチュエータ(いわゆる電気モータ等)もしくは直動型のアクチュエータ(油圧シリンダ等)など、いずれか一つの種類のアクチュエータが採用されていましたが、人型身体では腕部などの細い円筒形状の箇所もあれば、胴体部などの太い楕円形状の箇所もあり、同種の形状のアクチュエータだけを採用した場合、効率のよい配置が困難でした。そこで、Affettoの開発においては回転型と直動型のアクチュエータを併用する方式を採用しました。具体的には、脚部には太く長い直動型のエアシリンダを直列に配置し、胴体部分には薄型のエアシリンダを並列に配置し、腕部には円筒状の回転型のエアシリンダを直列に配置しました。この結果、80cm程度の小さな身体の中に、前腕部と顔面部を除いて26もの関節を実装することに成功しました。このサイズのロボットでこれほどの数の関節を実現した例は他にありません。サイズのイメージと取り得る姿勢の例を 図3 に、また動作中に加えられた外力を柔らかい姿勢変化で吸収する様子を 図4 に示します。

図3 脚部のサイズイメージと姿勢の例
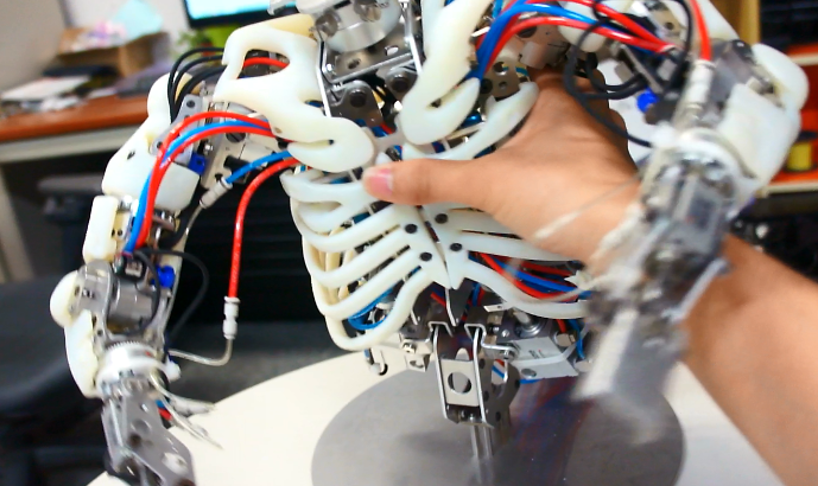
図4 動作中の上半身が外力を姿勢変化で吸収する様子(外装は試作段階の物です)
本研究成果が社会に与える影響(本研究成果の意義)
ロボットは決められた動作を正確に繰り返し実施できるという特長を生かし、主に生産業や過酷環境での作業用途での利用が進み、その特長をさらに伸ばすための技術が積み重ねられてきました。その一方で、ロボットを人のパートナーとしようとする試みや、人との触れあいの中で賢く振る舞えるようになっていく学習の仕組みを探求するための実験装置として利用しようとする試みも増えてきています。このような用途でロボットを利用しようとする場合、正確に動ける身体よりも、むしろ人と親密に触れ合うことができる身体の方が適していると考えられます。しかし、現状ではそのような場面でも、ほとんどの場合、正確性を重視して設計されたロボットが使用されています。
我々は、より触れあいに適した身体をロボットが備えることで、人との間で実現される触れあいがより親密になり、そのような触れあいの中で学習や人のパートナーとしての効果や効率がどのように高まるかを明らかにすることを目的として、子ども型ロボット「Affetto」を開発しています。今回公開したものは基本的な骨格部分のみですが、この基本骨格部分に人のような機能的な皮膚を実装することで、子どもを相手にするように親密に触れ合うことのできるロボットが実現されます。
特記事項
本研究は、科学研究費補助金 特別推進研究「神経ダイナミクスから社会的相互作用へ至る過程の理解と構築による構成的発達科学(代表:浅田稔、課題番号:24000012)」および科学技術人材育成費補助金 テニュアトラック普及定着事業(代表:掛下知行)の補助を受けています。
また、一部の成果はAdvanced Robotics誌(ⓒTaylor & Francis and The Robotics Society of Japan)に近日掲載予定です(論文DOI:10.1080/01691864.2015.1046923)。
参考URL
研究内容(石原 尚助教HPより)
http://www.ams.eng.osaka-u.ac.jp/user/ishihara/?page_id=110
研究室での研究内容(浅田研究室HPより)
http://www.er.ams.eng.osaka-u.ac.jp/asadalab/?page_id=21
大阪大学大学院工学研究科 知能・機能創成工学専攻 創発ロボティクス研究室(浅田研究室)
http://www.er.ams.eng.osaka-u.ac.jp/asadalab/?page_id=36
用語説明
- アクチュエータ
油圧や空気圧、また電気などのエネルギーを機械的な並進または回転運動に変換する駆動装置