この研究についてひとこと
人がロボットに何らかの印象を抱くということは、ロボットが人に「印象という情報」を伝えたことになるものの、この情報を狙い通りに操れていないのが現状です。コミュニケーションロボットの性能を高めるためには、人がロボットを認知するメカニズムの理解を深め、それを考慮に入れた設計を進めていくことが欠かせません。
石原尚
- 工学研究科
- 講師
ロボットの触り心地が性格の印象を変える 4種類の効果とその増強条件を特定
触れ合いの中で個性を色濃く感じさせるロボット実現の可能性
研究成果のポイント
概要
大阪大学大学院工学研究科の石原尚講師らの研究グループは、金沢大学子どものこころの発達研究センターの池田尊司助教、大阪大学先導的学際研究機構共生知能システム研究センターの浅田稔特任教授らとの共同研究で、ロボットの触り心地が性格印象を変容させる効果は少なくとも4種類存在し、人がロボットに触れた際、それらの1つあるいは複数の効果が複合的に作用して性格印象が変容する仕組みを世界で初めて推定しました。また、印象変容効果の1つは、ロボットとのコミュニケーションに対する特定の期待を持たせるような第一印象によって増強されうることも発見しました(図)。
これまでロボットの被覆表面の触り心地とそのロボットに対して人が抱く性格印象は、個別に評価されることがほとんどで、両者の関係については十分調べられていませんでした。したがって、ある性格印象を人に与えるようなロボットをデザインしたい場合であっても、表面の触り心地の決定は設計者の感覚に頼らざるを得ませんでした。
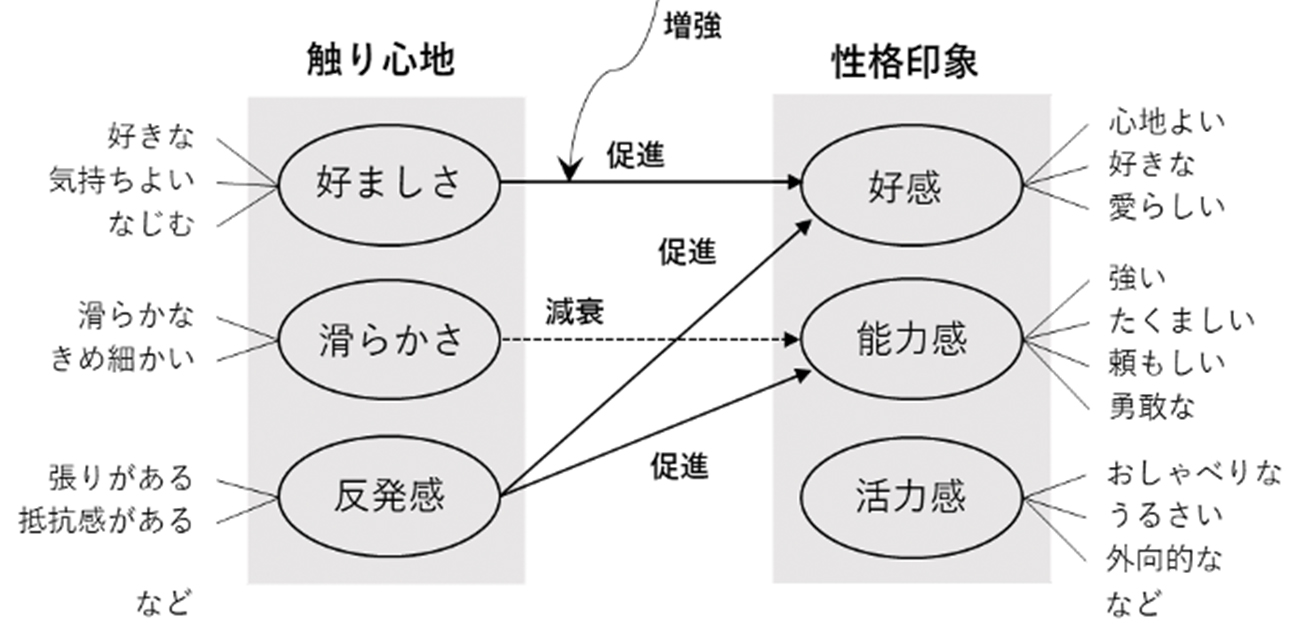
今回、石原講師らの研究グループは、ロボットの見た目や被覆の触り心地が異なる複数の条件において、人が静止状態のロボットに触れる実験を実施し、触れる前の第一印象、触れた部分の印象、触れた後の性格印象を多面的に質問紙調査し、それらの印象の関係を解析しました。その結果、触り心地が性格印象を変容させる効果は、「滑らかな感触は能力のある印象を低下させる」「反発力のある感触は性格の好感印象を向上させる」など少なくとも4種類存在し、人がロボットに触れた際、それらの1つあるいは複数の効果が複合的に作用して性格印象が変容すると考えるのが妥当であるとの結論を得ました。そして、変容効果の1つである「好ましい感触は性格の好感印象を向上させる」は、ロボットに触れる前の第一印象が「平穏で感情豊かな言語的なコミュニケーション」を期待させるものである場合により高い効果を示すことが確認されました。これらの関係を踏まえることで、所望の印象を与えられるロボットをデザインしようとする場合に、ロボットの第一印象や被覆の感触をどのようなものにするのがよいのかを逆算的に決定することが可能になります。それにより、個性をより色濃く感じさせるロボットを、ロボットのデザイナーが思い通りに作りだせるようになると期待されます。また、見た目や声などから伝わる性格の印象と、接触を通じて伝わる性格印象の乖離を減らすことで、ロボットとのコミュニケーションにおける違和感が低減することも期待されます。
本研究成果は、日本ロボット学会の欧文誌「Advanced Robotics」に、12月2日(木)午前9時00分(日本時間)に公開されました。
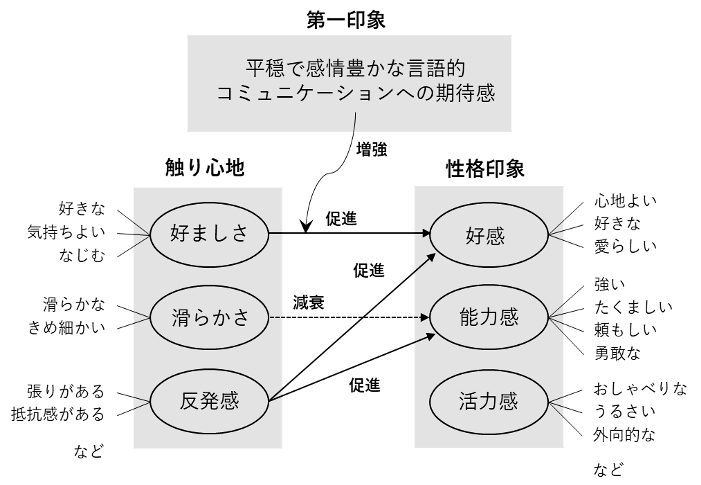
図 本研究で推定された性格印象の変容の仕組みの概略
研究の背景
これまで、ロボットの被覆表面の触り心地とそのロボットに対して人が抱く性格印象は、個別に評価されることがほとんどで、両者の関係については十分調べられていませんでした。例えば、複数台のロボットの触り心地や性格の印象がそれぞれどうであるかを調べ、単純にロボット間で優劣比較をするといった具合です。このような優劣比較は、出来上がったロボットの評価それ自体のためには有効ですが、評価が望ましいものでなかった場合に、「何をどのように変えればより良くなるのか」という改善方針を導き出すための根拠を得るには不十分です。したがって、ある性格印象を人に与えられるより良いロボットをデザインしたい場合であっても、表面の触り心地の決定は設計者の感覚に頼らざるを得ませんでした。その結果、見た目や声から伝わる印象と、接触によって伝わる印象の間に乖離が生じ、「見た目は頼りがいがあるのに、触った感じは頼りがいのない、もやもやした違和感のある印象になる」といったことが意図せず生じ、ロボットの印象を損なっている可能性がありました。
研究の内容
大阪大学大学院工学研究科の石原尚講師らの研究グループは、金沢大学子どものこころの発達研究センターの池田尊司助教、大阪大学先導的学際研究機構共生知能システム研究センターの浅田稔特任教授らとの共同研究で、ロボットの見た目や手部被覆の触り心地が異なる複数の条件(小型ロボット6種類と被覆4種類を組み合わせた24条件)において、人が静止状態のロボットの手部に触れる実験を実施し、触れる前の第一印象、触れた部分の感触印象、触れた後の性格印象を多面的(第一印象は57項目、感触印象は11項目、触れた後の性格印象は25項目)に質問紙調査しました。そして、複雑な因果関係を推定するための統計的手法の1つである調整効果を考慮したパス解析を用いて、「感触の印象の違いが、触れた後の性格印象をどのように変容させたか」と「その変容の強さは、どのような第一印象に依存して変わったか」を調べました。その結果、すべてのロボットについて、「好ましい感触は性格の好感印象を向上させる」「滑らかな感触は能力のある印象を低下させる」「反発力のある感触は性格の好感印象を向上させる」「反発力のある感触は能力のある印象を向上させる」の4種類のうちの1つあるいは複数の効果における統計的な有意性が認められました。そして、変容効果の1つである「好ましい感触は性格の好感印象を向上させる」効果は、「平穏で感情豊かな言語的なコミュニケーション」を期待させる第一印象が強いほど、増大することを確認しました。
本研究成果が社会に与える影響(本研究成果の意義)
これらの関係を踏まえることで、所望の印象を与えられるロボットをデザインしようとする場合に、ロボットの第一印象や被覆の表面の感触をどのようなものにするのがよいのかを逆算的に決定することが可能になります。それにより、ロボットのデザイナーが狙った個性をより色濃く感じさせるロボットを作りだせるようになると期待されます。例えば、好ましく、また能力のある印象を人に強く抱かせるロボットを実現したい場合には、第一印象として「平穏で感情豊かな言語的なコミュニケーション」を期待させるような見た目や動作を備えさせたうえで、できるだけ「好ましい反発力を有する滑らかでない」触り心地の表面となるようにデザインすればよいと判断することができます。
特記事項
本研究成果は、2021年12月2日(木)午前9時00分(日本時間)に日本ロボット学会欧文誌「Advanced Robotics」に掲載されました。
タイトル:“The first impressions of small humanoid robots modulate the process of how touch affects personality what they are”
著者名:Naoki Umeda, Hisashi Ishihara, Takashi Ikeda and Minoru Asada
DOI: http://dx.doi.org/10.1080/01691864.2021.1999856
なお、本研究は、JSTさきがけ研究、JSPS科研費若手研究の一環として行われ、「子どものこころの研究センターから展開する国際研究拠点の形成と社会実装」事業の支援を得て行われました。
参考URL
石原尚講師 研究紹介WebサイトURL
http://www.ams.eng.osaka-u.ac.jp/user/ishihara/
SDGsの目標

用語説明
- 触り心地
柔らかい、ハリがある、すべすべしている、心地よいなど、触れた部分に対して抱く印象。
- 性格印象
親しみやすい、魅力的である、たくましい、騒がしいなど、ロボットの内面の性質に対して抱く印象。
- 第一印象
今回の実験の場合、ロボットの姿形を見た直後に抱く幅広い印象。性格印象に加えて、人間らしい見かけである、コミュニケーションが図れそう、痛みを感じる能力がありそう、などの印象も含む。
- 調整効果を考慮したパス解析
パス解析は、複数の変数の間の結びつきの有無と強さを推定する統計的手法の1つ。その結びつきの強さが何らかの別の変数によって左右される場合、その影響は調整効果と呼ばれる。調整効果を考慮したパス解析を行うことで、変数間の結びつきと、その結びつきの強さを左右する要因を同時に解析できる。