
あなたはなぜ“やわらかい”のか。 知能と身体の深い関係
基礎工学研究科 教授 細田耕
手塚治虫原作のアニメ「鉄腕アトム」の主人公は10万馬力のモーターを搭載し、たたけば甲高い音の鳴る硬質なボディを持つ。ロボットは硬く、モーター駆動だというのが世間の常識かもしれない。大阪大学大学院基礎工学研究科の細田耕教授は「ソフトロボティクス」の分野で世界から注目される研究者だ。ソフトという英単語の語感通りに「柔らかい身体」をもつロボットは、従来の「硬いロボット」とは異なる特性を備える。「身体性」に着目して生物の身体が持つ機能まで模倣した柔らかいロボットを動かすことで、人間やその他の生物が獲得した知能が、身体の構造・機能と不可分の能力であるという事実がはっきりしてきた。細田教授の研究室を訪ね、知能と身体との関わりについて話を聞いた。
制御なしに複雑な動作
衝撃的な動画がある。
人間の腕の形をしたロボットがドアノブを握る。ロボットといえば、ぎこちなく動く姿をイメージしがちだが、このロボットは滑らかに手を動かし、ノブを左右に回してドアを開ける作業をいとも簡単にこなす。
「よほど高性能なコンピュータに複雑な制御プログラムを搭載しているに違いない」。そんな想像は即座に否定された。細田教授によるとロボットは人間の腕の構造を忠実に再現し、乱数を発生させて人工筋を駆動させているだけだという。
「人間が住む環境は人間に都合がいいように設計されている。皆さんはドアを開けるときノブを握って、捻って、引くという動作を意識しますか?ドアも人間が開閉しやすい形態になっていて、脳で考えなくても体の構造だけで開けることができるのです」
「ソフトロボティクス」は21世紀になって注目された分野だが、柔らかいロボットに使われる人工筋は1990年代には商品化されていた。構造は極めてシンプル。伸縮自在のゴムチューブを伸縮しない素材の「スリーブ」で覆う。スリーブは斜め方向の格子状に編まれており、チューブに圧縮空気を出し入れすることで筋肉のような伸縮を再現する。
空気を入れると、空気を充塡したチューブが横方向に膨張し、スリーブは内径が広がる分、縦方向に縮んで筋肉に力を入れる動きとなる。
細田教授が京都大学を卒業した80年代には、脳機能を模した「ニューラルネットワーク」で人工筋を制御しようとする研究者もいた。しかし圧縮空気の出し入れに0.2~0.3秒の時間がかかり、出力の特性も非線形であるため緻密な制御には向かず、数年のうちに見向きもされなくなった。
研究室からモーターを一掃
細田教授も最初は人工筋に懐疑的だった。研究生活の入り口では、一般的なロボットの開発と制御をテーマに選び、視覚情報を分析する「ビジョン」の分野で成果を上げていた。しかし98年、スイスに留学したことが大きな転機となる。
チューリヒ大学の人工知能研究室では、ロルフ・ファイファー教授(当時)を中心に、「身体性」についての研究が盛んに行われていた。生物の知能について探求する時、脳の働きだけに着目するのではなく、生きる環境と身体について考慮に入れることが不可欠だという考え方だ。「これだ」というひらめきがあった。さらにネット情報を通じてデルフト工科大学(オランダ)で、人工筋を使って歩くロボットの研究を進めていることを知り、衝撃を受けた。
「研究室からモーターを閉め出そう」と学生たちに宣言したのは2002年のこと。シリコンゴムで作った人間型の「柔らかい指」による触覚の研究や、デルフト工科大と同じように人工筋で受動歩行する脚の開発などに焦点を定めるようになった。
限られた「センサ」で環境を測る
柔らかい指は以前から温めていたアイデアだった。金属などを素材とする硬いロボットは、環境情報を得るセンサを表面に取り付け、設計者が想定した情報を読み取って制御に利用する。しかし人間の場合は、外部の情報を得るセンサは皮膚の表面ではなく内側にある。
柔らかい指では、指の形に成形したシリコンゴムの内部に、歪みや振動を検出するセンサをランダムな深さ、方向にして多数埋め込んだ。金属や木材など複数の素材を用意し、指を押しつけて擦る学習を繰り返すと、素材ごとにセンサの出力パターンが変化して、素材の識別が可能になることがわかった。06年に論文を発表すると、人間の感覚についての研究で頻繁に引用されるようになった。
人間の体内には多数のセンサが存在するが、その種類は限られているという。外部からの情報が、柔らかい体を通して内部に伝わって行く過程こそが、人間の多様な感覚を生み出す根源となっている。例えば温度を感じるセンサ。柔らかい指で金属に触れると熱が急速に奪われ、直後に指の内部にも温度差が伝わって、ひやっとした感触が生まれる。一方、木材に触れた場合の温度変化はゆっくりだ。その結果、温度を感じるという機能が、素材の違いを識別するという別の機能にも活用できており、同じ指のセンサで異なるものを測っている。
「外界から新たな情報を得る必要が生じたとき、硬いロボットでは外界からの情報を得るセンサを取り付けることで情報を取得する。でも生物の場合は、体に新たなセンサを付け足すわけにはいかない。限られたレセプタ(受容器)をやりくりして、豊かなセンシングを可能にしなければ、生物として生き延びることはできない」と細田教授は力説する。
模倣するのは「動き」ではなく「メカニズム」
デルフト工科大学ロボットの模倣から始めた人工筋によるロボット脚は、スタートから数年のうちに歩き、走り、連続ジャンプをこなすまでに成長する。人工筋の緊張度合いを変化させることで、これらの動作を1体のロボットで実現できることを示した08年の論文は、大きな反響を呼んだ。
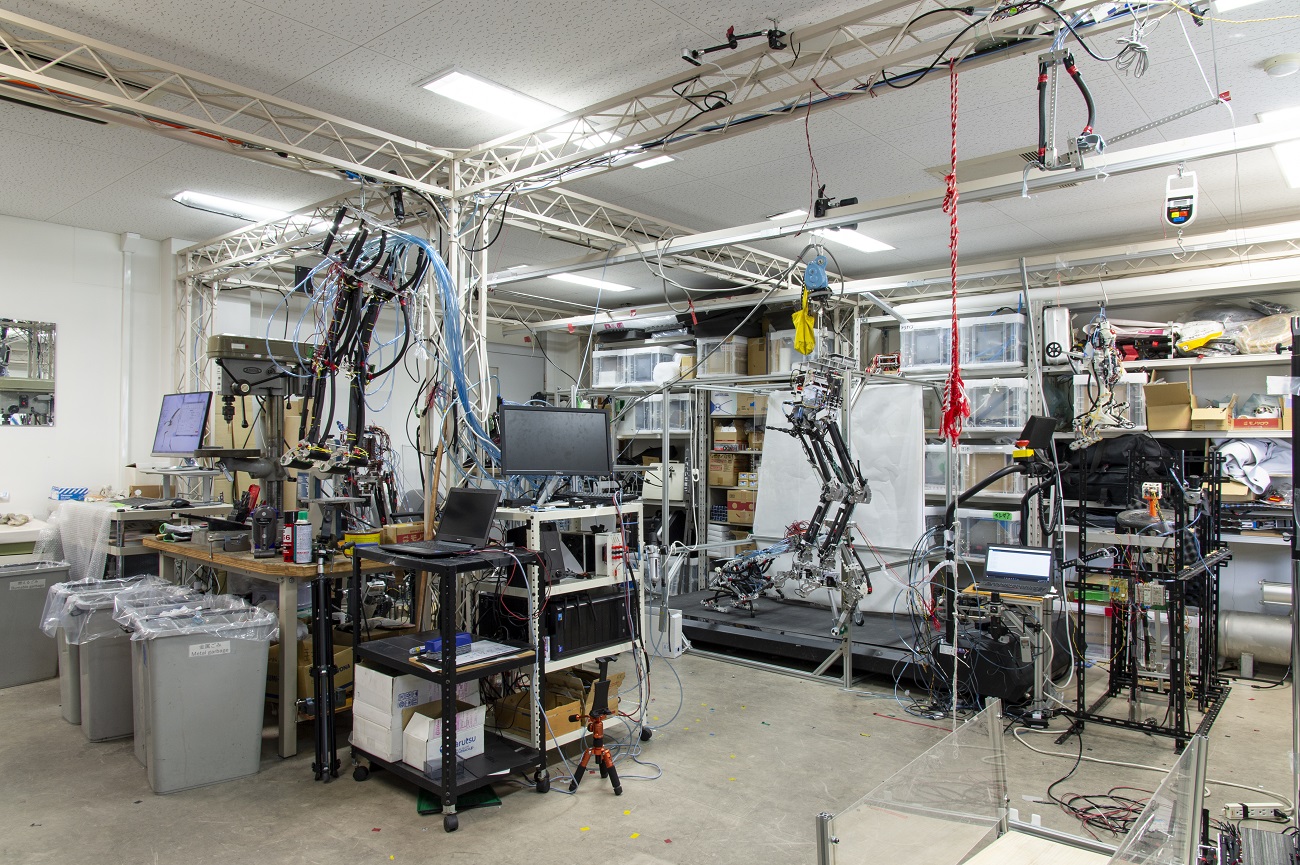
細田教授の研究室を訪れると、最新鋭のロボットに携わる場でありながら、20世紀の工房のような「アナログ」な空気が漂う。人工筋のためのゴムチューブとスリーブの他に、工業部品の通販ショップの箱が至るところに散らばっている。圧縮空気を送るためのコンプレッサと配管が目を引く一方、コンピュータの存在感は希薄だ。
そもそも人工筋は「制御」できるものではない。人工筋の組み立てや取り付けにはコツがあり、熟練の技が求められるため、研究室に入ったばかりの学生は先輩の技術を継承するための修業から始めるそうだ。
ロボットが人間の歩行をコピーする時、柔らかいロボットと硬いロボットでは根本的な違いがある。モーターで動きを精密に制御できる「硬いロボット」ならば、人が歩いている一瞬一瞬の姿勢を模倣することが、歩行の再現につながる。これに対して「柔らかいロボット」は、骨格や筋構造など人間の動作のメカニズムそのものを模倣する。それによって、人体にビルトインされている制御機能を模倣することも容易になる。
地面に転がっている石ころを踏んだ場合、動作を模倣する硬いロボットであれば、石から受ける力が身体全体に伝わるにもかかわらず、他の部位では既定の動作を継続するため、全体のバランスが崩れて転倒する。しかし人体であれば、バランスを調整して、何もなかったかのように歩き続けることが可能だ。私たちは普段これを意識せずにやっている。「ロボット」となると多くの人がその動きを制御したがるが、人の行動に照らして考えると、これらの行動は私たちが普段意識することなくやっているものが多い。柔らかいロボットを人間のメカニズムに限りなく近づけていけば、頭でっかちな“脳”をつけなくても、でこぼこの地面を自在に歩き回ることができるだろう。
知能と身体の「シナジー」
そもそも人が脳よりも身体のメカニズムを使ってやっていることはどれくらいあるのだろうか。乳児は、自分の身体の構造を学習するために四肢をランダムに動かすジェネラルムーブメントという動作をするといわれている。ランダムに動かしても、乳児の手には動きに傾向があり、顔(特に唇)に接触する機会が増える。このような偶然の接触によって、脳が、身体の構造や運動傾向を学習する機会を増やしていくのである。
箱に脳だけが入ったブレイン・イン・ザ・ポットで知能は実現できない。ただ単に外の世界から一方的に流れ込んでくる信号の処理だけでは、自分の身体に関する学習は進まない。身体による学習があってこそ環境へ適応することができる。こうして私たちは進化することによって「選択」されてきたのではないか。
「考える力」に頼ってしまうと大型コンピュータが必要となる複雑な動作も、身体のしくみを利用することで簡単に実現できる。骨格や筋組織といった体の構造そのもの、つまり身体こそが、生物の知能を構成する極めて重要な要素であることが次第に明らかになってきた。
「無いこと」を見せる学問
「ソフトロボティクスは『無いこと』を見せる学問なんじゃないか」
細田教授はそう考える。「精度の点では、硬いロボットとは戦えない」。硬いロボットはボディの剛性を上げ、高性能のコンピュータやモーターを投入することで、より精密な制御が可能になる。柔らかいロボットは、制御しようとすれば振動に悩まされて精度を出しにくく、動作を解析してモデル化したり、動きの精度をグラフ化してパフォーマンスの良さをアピールすることも困難を極める。
しかし、「100円のCPUでも動くような計算量の少なさ」(細田教授)で複雑な人間の動きを模倣できてしまうことが、柔らかいロボットの最大の持ち味だと言える。「ロボットをつくれば、もっと制御したいという欲求がどうしても生じる。でも、人間の体はそれ自体が歩くのに有利な特性を備えていて、脳が歩くことについて考える必要がないようになっているはずだ」
細田教授が目標地点として見据えるのは、生物の知能がどのように成り立っているのかという問いに答えることだ。柔らかいロボットを案内役にしながら、生物が限られたレセプタで環境変化に適応し、生き残ってきた過程を解き明かすことが、その近道になると考えている。
細田教授にとって研究とは
生物の身体についての「真理」を見つけ出し、それが知能とどうつながっているかを解き明かして、みんなに披露すること。教授という立場になり、自ら実験に関わる機会が限定されるのはつらいが、自分でやりたいことを少しだけ我慢して、次に真理を発見する人を育てるのも素晴らしいことだ。
細田 耕(HOSODA Koh)
大阪大学大学院基礎工学研究科 教授
1990年京都大学大学院工学研究科 博士課程修了、博士(工学)。同年大阪大学工学部助手、97年大阪大学大学院工学研究科准教授、2010年同大学院情報科学研究科教授、14年から現職。専門分野は情報通信、知能ロボティクス。
■ 「ひととは何か?」に迫る研究者たちの物語「ひとの正体~奇才たちのスペシャリテ~」を引き続きお楽しみください。

ひとの正体~奇才たちのスペシャリテ~ #1 基礎工学研究科 教授 石黒 浩
ひとの正体~奇才たちのスペシャリテ~ #2 基礎工学研究科 教授 細田 耕
あなたはなぜ“やわらかい”のか。 知能と身体の深い関係

ひとの正体~奇才たちのスペシャリテ~ #3 基礎工学研究科 教授 長井 隆行

ひとの正体~奇才たちのスペシャリテ~ #4 生命機能研究科 教授 北澤 茂

ひとの正体~奇才たちのスペシャリテ~ #5 生命機能研究科 准教授 中野 珠実

ひとの正体~奇才たちのスペシャリテ~ #6 社会技術共創研究センター 准教授 赤坂 亮太

ひとの正体~奇才たちのスペシャリテ~ #7 先導的学際研究機構 特任教授 浅田 稔

ひとの正体~奇才たちのスペシャリテ~ #8 人間科学研究科 教授 檜垣 立哉
(2021年3月取材)