この研究についてひとこと
ロボット工学の発展により、生物学など様々な分野において科学のありかたが変化しつつあります。将来、ロボットの制御や身体構造が動物に接近していくことで、ロボット学と生物学が深く融合すれば、われわれ人間や動物がなぜ、どのようにして生きているのかを解き明かす第一歩になるかもしれません。

増田容一
- 工学研究科
- 助教
歩くネコをロボットで再現、反射回路を新発見
四脚歩行ロボットで動物の生体解明へ
研究成果のポイント
- 動物の神経および筋肉の特性を再現可能な四脚ロボットを開発。ロボットを用いた歩行実験により、ネコの安定した歩行運動を生み出す反射回路の候補を発見
- 「腰・膝伸筋間の相互興奮性回路」というきわめてシンプルな構造をもつ反射回路をそれぞれの脚に再現するだけで、安定した歩行運動、および、ネコの歩行実験で観察される複数の現象を再現
- 四脚動物が巧みに歩行するしくみの解明、および、脚歩行ロボットの運動性能の向上に期待
概要
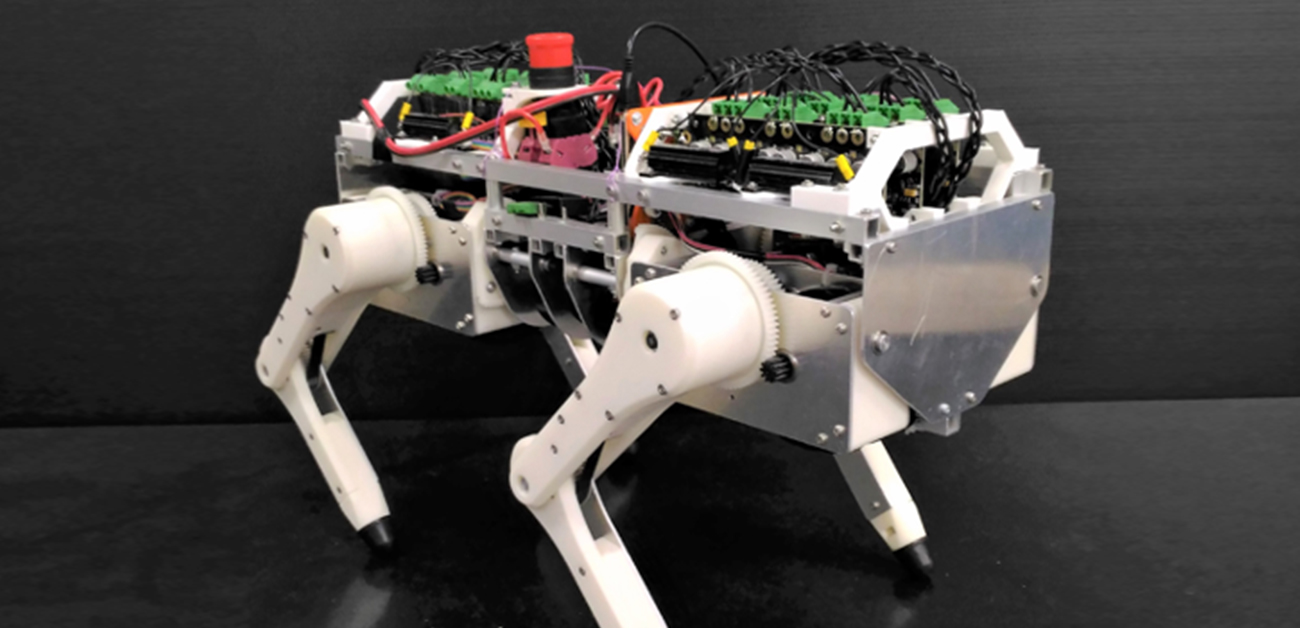
大阪大学大学院工学研究科の大学院生(当時)の谷川豊章さん(令和3年3月博士前期課程修了)、増田容一助教、石川将人教授らの研究グループは、動物の神経および筋肉の特性を再現可能な四脚ロボット(図1)を開発しました。本ロボットを用いた歩行実験により、ネコの安定した歩行運動を生み出す反射回路の候補を発見しました。
ネコの歩行を司るいくつかの神経機構は20世紀後半の研究によって発見されています。現在は、動物愛護の観点から、動物を用いた実験は厳しく管理・制限することができていますが、その反面、動物のしくみに関する研究は歩みが遅くならざるを得ない状況にあります。それゆえ、過去に発見された複数の神経機構が動物の体の中でどのように統合されているのか、すなわち歩行を司る反射回路がどのように配線されているのかは未だ謎のままです。
今回、研究グループは、実際の動物を調べる代わりに、動物の神経および筋肉の特性をコンピュータ上で再現して歩く四脚ロボットを開発しました。本ロボットを用いれば、動物実験を行わずとも様々な実験が可能です。
ロボットを用いて、歩行を生み出す反射回路を探索した結果、「腰・膝伸筋間の相互興奮性回路」というきわめてシンプルな反射回路の構造を発見しました。発見した反射回路をそれぞれの脚に再現するだけで、安定した歩行運動が生じたほか、発見した相互興奮性回路を切断するとロボットの歩行が不安定になること、相互興奮性回路からネコと同様の支持脚期延長現象が生じることを示しました。
本成果は、生物学とロボット工学の両分野に貢献することが期待されます。生物学に新しい知見をもたらすのはもちろんのこと、今後、実験動物の代わりとなるロボットが増えていけば、より多くの研究者が幅広い実験条件下で動物のしくみを調査できるようになります。また、ロボットの構造が動物に近づくことで、動物のように効率的かつしなやかに動き回るロボット実現のための基盤技術となることも期待できます。近年、ペット産業は拡大傾向にあり、パートーナーとなる動物たちの知見を得やすくなることは、愛猫家などペットと共生する社会においても意義のある成果だと言えます。
本研究成果は、オンライン論文誌「Frontiers in Neurorobotics」に、4月8日(日本時間)に掲載されました。
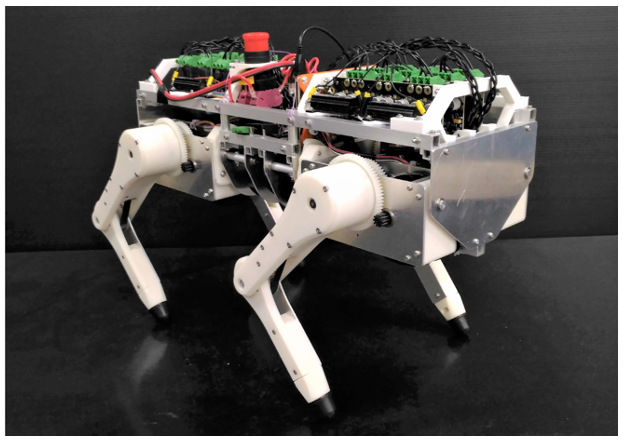
図1. 動物の神経・筋特性を再現可能な四脚ロボット
研究の背景
動物の歩行運動は脳や脊髄内の複雑な神経回路によって生み出されると考えられがちですが、近年、シンプルな反射回路のみによって安定した歩行のリズムや足並みを生み出せることが報告され、四脚動物が効率的かつ安定して歩行するしくみの解明が期待されています。
これまで、ネコの歩行に関わる幾つかの神経機構が実験によって発見され、シミュレーションやロボットによる再現も試みられてきました。しかし、これら複数の神経機構が動物の体の中でどのように統合されているのか、すなわち歩行を司る反射回路がどのように配線されているのかという構造は未だ明らかではありません。
研究の内容
今回、本研究グループは、動物の神経および筋肉の特性を再現可能なロボットを開発しました。本ロボットは柔らかさと力強さを兼ね備えた低減速比のモータを搭載しており、コンピュータが計算した筋肉の特性を実世界のロボット上で再現することができます。本ロボットの歩行実験を通して、安定な歩行を生み出す反射回路を探索した結果、「腰と膝の伸筋間の相互興奮性回路」というきわめてシンプルな構造をもつ反射回路を発見しました。発見した回路をそれぞれの脚に再現するだけで、安定した歩行運動が生じました。さらに、発見した相互興奮性回路を切断するとロボットの歩行リズムが不規則になることを示しました。加えて、20世紀後半に行われた実験と同じ条件となるように、相互興奮性回路を刺激すると、ネコと同様の支持脚期延長現象が観察されました。このことから、相互興奮性回路がネコの歩行を司る重要な回路であることが示唆されます。
本研究成果が社会に与える影響(本研究成果の意義)
本成果は、生物学とロボット工学の両分野に貢献することが期待されます。現在、実際の動物を用いた実験は厳しく管理・制限されているため、生きて動き回る動物のしくみを内部から調べることは困難です。Robotics-inspired Biologyと呼ばれる研究領域では、実験動物の代わりにロボットを用いることで動物を理解する手法が試みられています。動物の神経や筋肉を再現して理解する研究は、ネコの後ろ足のシミュレーションや、二脚の跳躍ロボットがすでに提案されています。今後、実験動物の代わりとなるロボットが増えていけば、より多くの研究者が幅広い実験条件下で動物のしくみを調査できるようになります。またロボット工学の視点から見ると、ロボットを動物の構造に近づけることは、Biology-inspired Robotics(生物規範ロボティクス)と呼ばれる研究領域にも貢献します。本研究成果は、動物のように効率的かつしなやかに動き回るロボット実現のための基盤技術となることが期待できます。
特記事項
本研究成果は、オンライン論文誌「Frontiers in Neurorobotics」に、2021年4月8日(日本時間)に掲載されました。
タイトル:“A Reciprocal Excitatory Reflex Between Extensors Reproduces the Prolongation of Stance Phase in Walking Cats: Analysis on a Robotic Platform”
著者名:Toyoaki Tanikawa, Yoichi Masuda, and Masato Ishikawa
【DOI】:10.3389/fnbot.2021.636864
なお、本研究は、JSPS 科学研究費(S)17H06150、科学研究費(若手)20K14695、挑戦的研究(萌芽)19K21974、および京都技術科学センター研究開発助成の支援を受けて行われました。
関連動画
下記のサイトより今回開発した四脚歩行ロボットの動画を見ることができます。
https://youtu.be/-iLHRhvDccA
参考URL
増田容一助教 研究者総覧URL
https://rd.iai.osaka-u.ac.jp/ja/9310fba29cdc41ee.html
SDGs目標

用語説明
- 腰・膝伸筋間の相互興奮性回路
膝関節を伸ばす筋肉が力を受けたときに腰関節を後ろへ伸ばし、腰関節を伸ばす筋肉が力を受けたときに膝関節を伸ばすような神経の回路
- 支持脚期延長現象
足首を伸ばす筋肉の神経を電気的に刺激すると、脚が地面についたままになり、つぎの一歩が踏み出せなくなる現象