この研究についてひとこと
昆虫大好き人間である、研究担当のマッサムは、奇しくも仮面ライダー生誕50年にあたる2021年に”仮面ライダープロジェクトX”にひきつけられるように、自らの人生を賭けて取り組むべく、阪大にやってきました。時はCovid19真っ只中。母国・バングラディシュに足止めを余儀なくされるなど、思い通りに研究が進まないこともありましたが、マッサムと僕らは諦めませんでした。僕らのテーマソングは仮面ライダー1号の主題歌。50年前の幼稚園時代が懐かしい。時を越えて、アイデアがつながった瞬間。「へ~んしん!ベルト?ゴーグル?マスク?ヘルメット!?これだ!」マッサムの試行錯誤が続きました。マッサムは現在、ドクター論文、いや世紀の大作の完成に向けて、あと一歩。頑張れマッサム!やっぱり挑戦する学生との出会い、研究はおもしろい!!
森島 圭祐
- 工学研究科
- 教授
小型ヘルメットの“光”で昆虫サイボーグを制御
昆虫の負担と慣れを小さくし、ナビゲーション持続性を向上
研究成果のポイント
- 昆虫頭部のヘルメットの“光”によって昆虫サイボーグを制御する、新しい自律ナビゲーションを実現
- 従来の昆虫サイボーグ制御は神経への電気刺激に依存しており、手術による感覚器官の損傷や刺激への慣れに課題があった。本研究では、昆虫の「負の走光性」を活用することで、感覚に働きかけるだけで行動を制御することを実現。昆虫の自然な行動を維持しつつ、ナビゲーションの持続性を大幅に向上
- 昆虫の負担が少ないバイオハイブリッドナビゲーションシステムが実現可能となり、災害救助や環境モニタリングなど、さまざまな分野への応用が期待される
概要
大阪大学大学院工学研究科の森島圭祐教授およびChowdhury Mohammad Masum Refatさん(博士後期課程)の研究グループは、昆虫が紫外線に対して避けるように行動する「負の走光性」を活用し、UV-LED付き小型ヘルメットを操作することで、未知の環境下でも適用できる昆虫サイボーグの自律ナビゲーション方法を開発することに成功しました。
従来の昆虫サイボーグは電気刺激による制御が一般的であり、サイボーグの作成には昆虫の感覚器官にダメージを与えるような処置が必要でした。さらに、昆虫が刺激に慣れてしまうことで、制御が難しくなるという課題もありました。今回の新しい手法により、昆虫本来の感覚を損なうことなく、少ない刺激回数で高い制御持続性を実現し、複雑な環境でのナビゲーションに成功しました。
この研究では「バイオインテリジェント昆虫サイボーグ(BCI)」という新たな概念を提唱します。BCIは、生物の持つ知能と人工的なフィードバック機構を統合し、将来のバイオハイブリッド・ロボティクスに向けた拡張性があり、かつ環境に優しいモデルを提供します。
本研究成果は、米国科学誌「Advanced Intelligent Systems」に、5月12日(月)午前4時(日本時間)に公開されました。
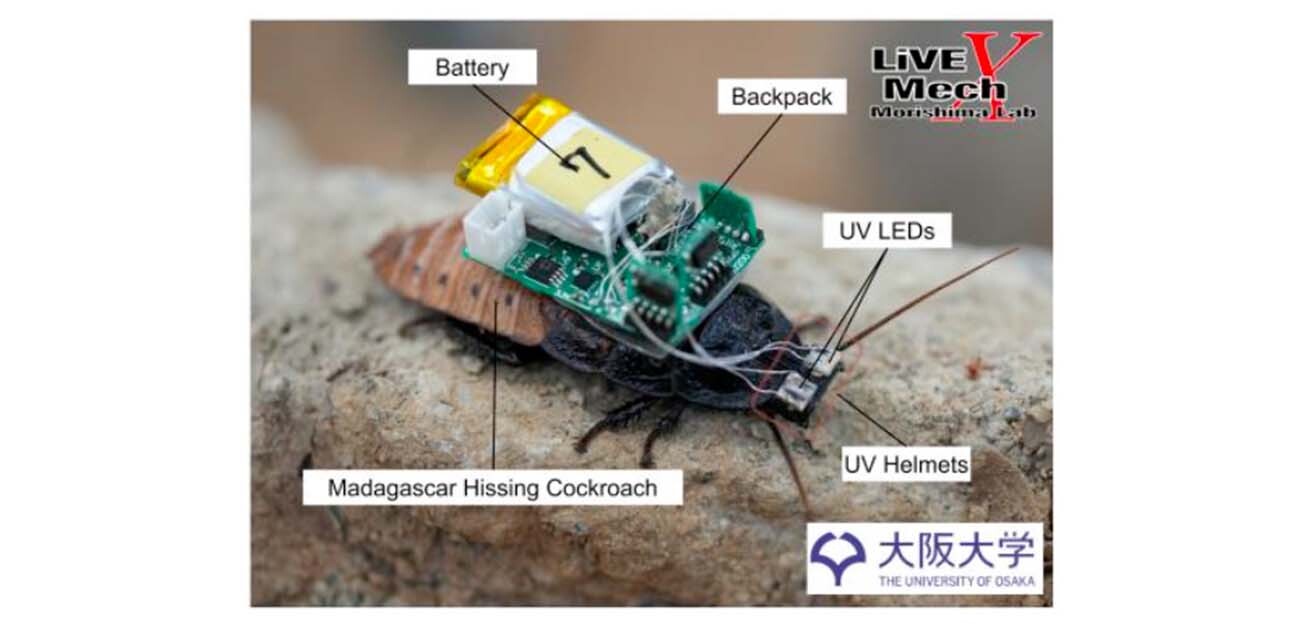
図1. 開発されたバイオインテリジェントサイボーグ昆虫(BCI)
研究の背景
昆虫は、複雑な運動をコントロールできる高度な感覚システムを備えています。これまでの昆虫サイボーグの制御技術は、主に神経への直接的な刺激に依存しており、昆虫に大きな負担をかけるものでした。この方法では、昆虫が刺激に慣れてしまうことで制御が難しくなるほか、エネルギーの消費量も増加する傾向にあります。さらに、感覚器官にダメージを与える可能性もあり、それによって昆虫本来の行動特性が損なわれる懸念もありました。
研究の内容
研究グループは、昆虫の頭部形状を3次元計測することで、複眼に狙いを定めて紫外線を照射することができるUV-LEDヘルメットを開発しました。これにより、昆虫が紫外線に対して避けるように行動するという「負の走光性」を活用し、進行方向を自在に制御することに成功しました。さらに、このヘルメットに加えて、慣性計測センサーや距離センサーを組み合わせることで、昆虫の感覚器官を損なうことなく、自然な行動を維持しながら高精度な制御を実現しました。これにより、構造化されていない複雑な環境下でも、自律的なナビゲーションを行うことに成功しました。
また、従来の電気的な制御で課題となっていた刺激への慣れも本手法では回避でき、安定的かつ長期間の制御が可能になりました。これらは、自然な行動を活用する感覚駆動型制御メカニズムが、従来の電気刺激に代わる有力な手法であることを実証し、現実世界での目的志向型ナビゲーションの実現に向けた新たな道を切り開いたことを意味しています。
この研究では「バイオインテリジェント昆虫サイボーグ(BCI)」という新たな概念を提唱します。本手法は、BCIの考え方に基づく、生物の持つ知能と人工的なフィードバック機構を統合した、ロボティクスの次世代インターフェースです。刺激の最小化によりバッテリー消費を抑え、昆虫サイボーグの動作寿命を延ばすとともに、素体となる昆虫への負担を軽減し、行動特性の低下を防ぐことにも貢献します。
図2. バイオインテリジェント昆虫サイボーグ(BCI)システム
(A) BCIはUV-LEDヘルメットをゴキブリに装着し、複眼を刺激することで方向制御を実現する。
(B) 従来のサイボーグ昆虫における電気的な運動制御(赤)と、BCIにおける感覚ベースの制御(青)の比較。
BCIは昆虫の自然な神経経路を活用して意思決定を行う。
図3. BCIの行動性能およびシステムの検証概要 (A)平均して81.3%の移動は自然な行動であり、刺激が必要だったのは18.7%にとどまった。(B-C)電気刺激の場合、試行回数が増えるごとに反応が減少した。BCIの場合、電気刺激よりも多い試行回数にも関わらず、反応は安定していた。(D-E)自然な状態の昆虫は複雑な環境からは抜け出せないことが多いが、BCIは高い脱出成功率を示しながら安定したナビゲーションを実現した。
本研究成果が社会に与える影響(本研究成果の意義)
今回の技術革新により、BCIという概念を新たに導入し確立しました。これは従来の直接的な刺激による制御とは異なり、生体システムとロボティクス制御との調和を実現し、昆虫自身の行動原理を活かす生物統合型の戦略です。これにより、危険または複雑な地形でのナビゲーションを必要とする災害現場や環境モニタリングなどで活用が期待されるバイオハイブリッドナビゲーションシステムの発展を大きく進めます。
特記事項
本研究成果は、2025年5月12日(月)午前4時(日本時間)に米国科学誌「Advanced Intelligent Systems」(オンライン)に掲載されました。
タイトル:“Autonomous Navigation of Bio-Intelligent Cyborg Insect Based on Insect Visual Perception”
著者名:Chowdhury Mohammad Masum Refat , Mochammad Ariyanto, Ryo Tanaka, Kotaro Yamamoto, Keisuke Morishima
DOI:https://doi.org/10.1002/aisy.202400838
なお、本研究は、内閣府ムーンショット型研究開発制度「2050年までに、AI とロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」(JPMJMS223A) 及び科研費基盤研究S(22H04951)の支援を受けて行なわれました。
参考URL
SDGsの目標


用語説明
- バイオハイブリッドナビゲーションシステム
生物本来の能力を活用し、外部からの指示ではなく、自分で考えて動く能力を持つナビゲーションシステムのこと。周囲の情報を収集し、その情報を基に進行方向を決めたり、障害物を避けて目的地までのルートを決定する。移動やトラブルへの対応などは素体となる生物自身が持つ能力によって実現する。
- バイオインテリジェント昆虫サイボーグ(BCI)
生物は、例えば光を感受するとそちらに向かうといったように、感覚によって認識したことに基づき運動をおこなう。こういった神経的意思決定メカニズムにより誘発される行動と、昆虫の状態に基づいて刺激装置を作動させる人工知能を統合したシステムを搭載した昆虫サイボーグのこと。