マイクロロボットを“流れ”作業で迅速に作製
生体分子モーターによる人工筋肉で自在にプリント・動的再構成可能に
研究成果のポイント
- マイクロ流路の中で、光に応答する材料を流しながら、マイクロロボットのボディと駆動源となるアクチュエータを連続的に生産・組み立てを行う「マイクロロボットその場組み立て法」を開発
- 様々な機能をもつマイクロロボットの迅速な作製に成功
- より高機能なマイクロロボットの実現と、マイクロロボットの量産化に期待
概要
大阪大学大学院工学研究科の森島圭祐教授、王穎哲特任研究員(常勤)は、 北陸先端科学技術大学院大学・先端科学技術研究科の平塚祐一准教授、岐阜大学・工学部の新田高洋教授との共同研究で、マイクロ流路内で、マイクロロボットの部品をプリント成形し、その場で組み立てることに成功しました。マイクロロボットの機械構造は光応答性ハイドロゲルでつくられ、アクチュエータは同じチームが開発した生体分子モーターからなる人工筋肉を利用しました。このアクチュエータと機械部品をマイクロ流路内で組み立てることにより、マイクロロボット製造の柔軟性と効率が向上しました。この方法で、様々な機能のマイクロロボットが実現されました。また、この成果により、これまで困難であった、特に柔軟な構造を持つマイクロソフトロボットの実現や、マイクロロボットの量産化が期待されます。
本研究成果は、2022年8月24日午後2時(米国時間)に発行される科学雑誌「Science Robotics」の表紙を飾りました。
研究の背景
マイクロロボット、特に柔軟な構造を持つロボットは、生物医学などの分野で非常に幅広い応用の可能性があるものの、小さなロボットにアクチュエータなど様々な機械部品を組み込むことは困難で、高機能のマイクロロボット開発の障害となっています。従来の方法では、通常、機械構造やアクチュエータなど、マイクロロボットの様々な部品を異なる場所で製造し、一つ一つ組み上げていくピック アンド プレース アセンブリによってマイクロロボットがつくられていました。この方法は時間と労力がかかり、また多くの制限があることが課題となっています。
研究の内容
本研究では、自然界の生体内システムの自己組織化プロセスに着想を得て、2021年に発表したプリント可能な生体分子モーターからなる人工筋肉(1)(2)に基づき、ロボット部品をその場で加工・組み立てしてマイクロロボットを製造する方法を開発しました。マイクロ流路内で、マスクレスリソグラフィーにより、ハイドロゲル材料の機械的構造をプリントし、次に生体分子モーターからなる人工筋肉がハイドロゲル機構の狙った位置に直接プリントすることで、機構を駆動して目的の仕事を実施します(図1) 。 このその場組み立てにより、マイクロロボットを迅速に次々と生産することができます。
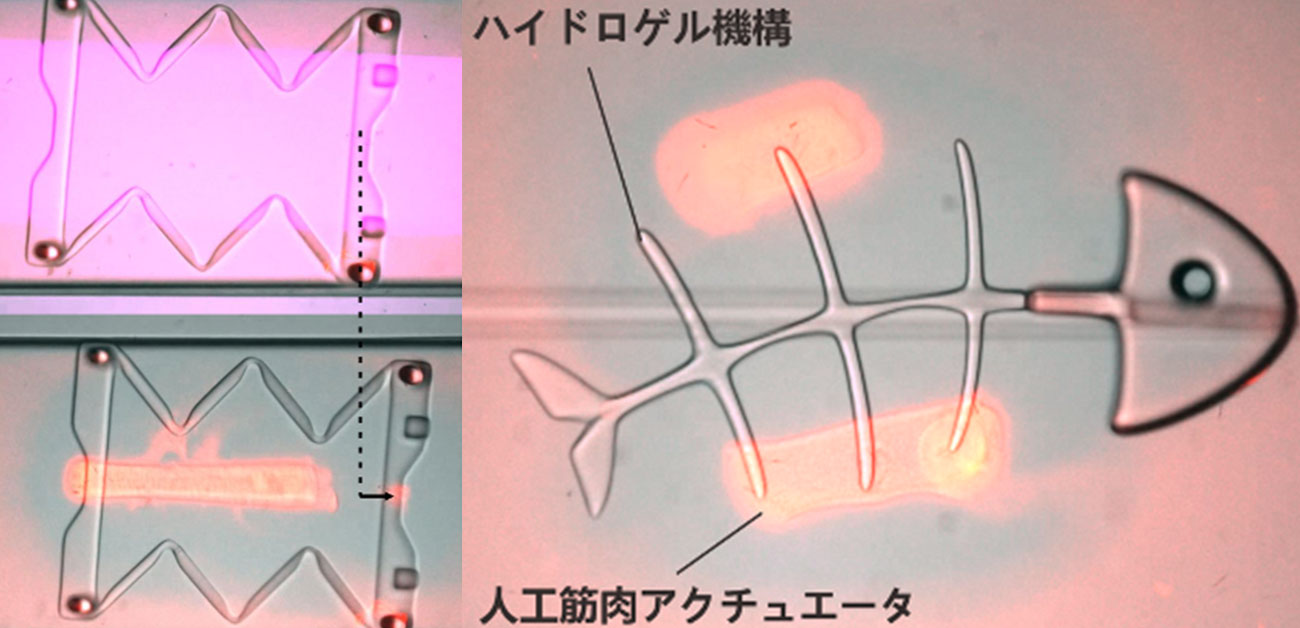
また、マイクロロボットに新しい人工筋肉を再プリントすることにより、アクチュエータを迅速に動的再構成し、複雑な仕事を行うマイクロロボットを実現しました(図2)。
さらに、生体分子モーターを使用する本研究とは異なる、生きた筋肉細胞を用いるアプローチとして細胞ハイブリッドロボットが注目されています。細胞ハイブリッドロボットは、柔軟性が高く、環境負荷が低いという利点があるものの、筋肉細胞の培養に数日かかってしまうという問題があります。本研究では、設計の柔軟性を向上させながら、製造プロセスを大幅に簡素化することに成功しました。今後のオンチッププリンティング技術の向上や人工筋肉の性能向上により、現在の細胞ハイブリッドロボットのボトルネックを打破し、実用化に向けた一歩を踏み出すことが期待される手法であると考えています。
(1)https://www.nature.com/articles/s41563-021-00969-6
(2)https://www.jaist.ac.jp/whatsnew/press/2021/04/20-1.html
図1. マイクロロボットその場組み立て法
図2. その場組み立て法によって製造したマイクロロボットが生体分子モーターからなる人工筋肉によって駆動する様子
本研究成果が社会に与える影響(本研究成果の意義)
今回の研究により、自然界の生体分子モーターによって運動が創発する自己組織化現象をオンチップ微小空間上で工学的に制御し、自在にデザインできる加工プロセスをボトムアップ的な発想でより簡便に実現できました。これにより、これまで超微小部品をトップダウン的に組み立てることが大きなボトルネックであったために遅れていた、マイクロロボットの組み立てやマイクロソフト機構のオンデマンド生産が可能になりました。今後、様々な機能を付与したマイクロロボットがオンチップ上で連続的にオンデマンド生産することが可能になり、化学エネルギーだけで駆動する超小型マイクロロボットが健康医療応用など様々な分野に展開、波及していくことが期待できます。
特記事項
タイトル:“In situ integrated microrobots driven by artificial muscles built from biomolecular motors”
著者名:Yingzhe Wang, Takahiro Nitta, Yuichi Hiratsuka ,and Keisuke Morishima
DOI:https://www.science.org/doi/10.1126/scirobotics.aba8212
なお、本研究は、日本学術振興会(JSPS)科研費 基盤研究(S)(課題番号22H04951)、基盤研究(A)(課題番号22H00196)、基盤研究(B)(課題番号19H02106)、学術変革領域研究(A)(課題番号21H05880)、挑戦的萌芽研究(課題番号21K18700)、新エネルギー・産業技術総合開発機構(NEDO)「次世代人工知能・ロボット中核技術開発」(JPNP15009)の支援を受けて行われました。
参考URL
森島圭祐教授 研究者総覧
https://rd.iai.osaka-u.ac.jp/ja/90351526dc15ef59.html
生命機械融合ウェットロボティクス領域
http://www-live.mech.eng.osaka-u.ac.jp/
SDGsの目標




用語説明
- マイクロ流路
ガラスや高分子材料で作製した数ミリメートルから数マイクロメートルの流路で、効率的に化学反応などを起こすことができる。微小なバイオセンサーや化学分析装置に利用されている。
- マイクロロボット
数ミリメートル以下のサイズのロボットで、医療などへの応用が期待されている。
- アクチュエータ
モーターやエンジンなどのように電気や化学エネルギーなどを利用して、動きや力を発生する装置。
- 光応答性ハイドロゲル
紫外線などの光を照射することでゼリー状に固まる物質。
- 細胞ハイブリッドロボット
培養細胞と機械部品を融合させて作製したロボット。