この研究についてひとこと
生物に本来備わっている能力を活用したバイオハイブリッドナビゲーションシステムという純粋な機械では達成できない新しい概念を作り、自動化や省エネが重視される流れの中に新しい視点をもたらすことができたと思います。
森島圭祐
- 工学研究科
- 教授
生物本来の能力を活用した昆虫サイボーグの 自律的なバイオハイブリッドナビゲーションアルゴリズムを開発
未知の環境でも目的地に到達できる!
研究成果のポイント
- 砂地に石や角材を配置した障害物コースでも目的地に到達できる昆虫サイボーグ用の自律的なバイオハイブリッドナビゲーションアルゴリズムを2種類開発した。
- 小さな電子基盤のみを使用し、歩く、登る、障害物の回避、転倒からの回復などといった、生物が当たり前に持っている能力を活用することで、野外での昆虫サイボーグ使用が実現に近づいた。
- 災害発生直後の現場確認や救助者の発見、文化遺産の内部調査、配管スペースの点検など様々な観点からの貢献が期待できる。また、この研究で得た技術を応用することで、宇宙や深海探査の先駆けに利用できる可能性も考えられる。
概要
大阪大学大学院工学研究科の森島圭祐教授とディポネゴロ大学(インドネシア)のMochammad Ariyanto特任助教らの国際共同研究グループは、外部のセンサーやカメラを使わず、何が起こるか予測できない環境でも適用できる昆虫サイボーグ用の自律的なバイオハイブリッドナビゲーションアルゴリズムを2種類開発しました。
ロボットの小型化は大きな課題ですが、昆虫サイボーグは素体の昆虫に電子装置を取り付けるだけで作成できるため、大きさの問題を簡単に解決することができます。しかし、従来型のロボット、昆虫サイボーグともに不整地での制御は困難です。さらに自律的なナビゲーションを実現させるにはカメラやセンサーから得た対象の位置や動きの変化を記録・解析するためのコンピューターが不可欠であり、これは昆虫サイボーグに搭載できる大きさではありませんでした。
本研究では昆虫本来の能力を活用して、昆虫サイボーグに搭載されたデバイスだけで自己処理を行い、目標地点と現在地の座標を取得し、複雑な環境でも目的地に到達できることを実証しました。この技術は、今後救助活動や建物の内部確認などにとどまらず、宇宙・深海探査などの様々な分野での応用が期待できます。
本研究成果は、米国科学誌「Soft Robotics」に、2月12日(水)4時(日本時間)に公開されました。
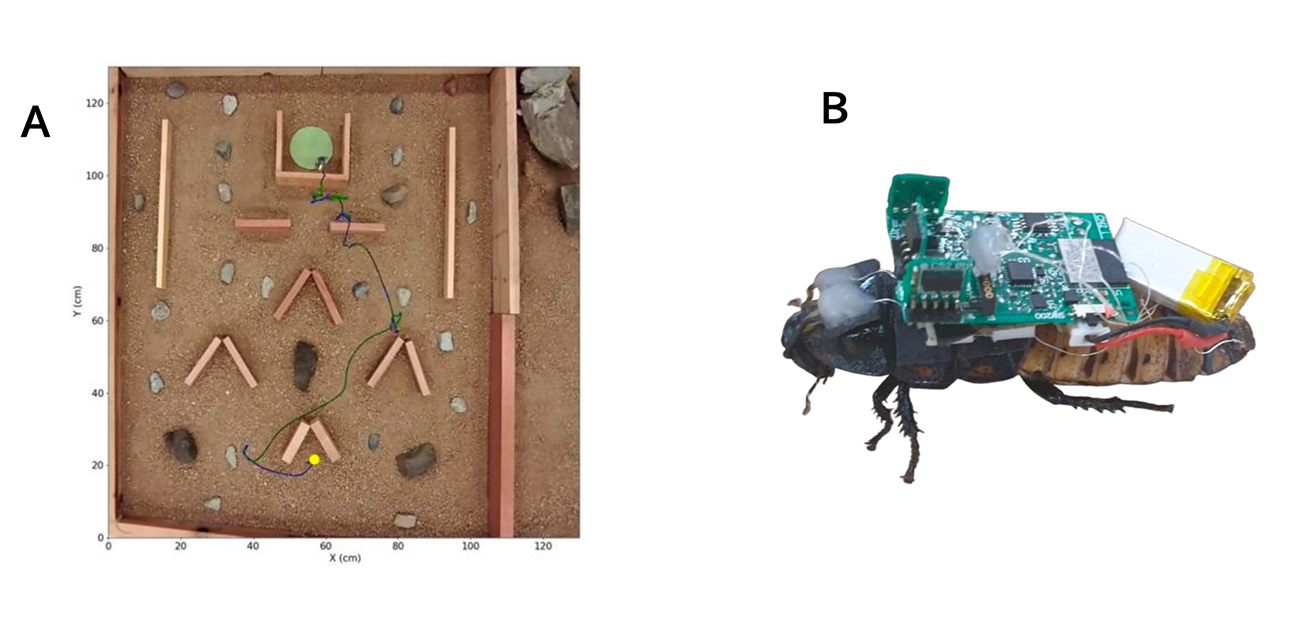
図1. (A)昆虫サイボーグがスタート地点(下部黄色点)からゴール地点(上部の緑円部分)まで到達する軌跡
(B)昆虫サイボーグの完成図
研究の背景
移動可能なロボットを小型化し、なおかつ障害物を避けつつ目的地に到着できるようにすることは狭い空間での作業性向上やコストの削減など様々な点から重要視されています。純粋なロボットで実現しようとする場合、目的達成のために必要な計測機器に加えて周囲の状態を検知するセンサー、移動のための駆動装置、これらを稼働させるバッテリーが必要で、昆虫サイズまで小型化することは困難です。その点、昆虫サイボーグは昆虫に小さな電子制御装置を取り付けるだけであり、移動や周囲の状況確認は昆虫自身の能力で行うため、大きさの問題を簡単に解決することができます。また、昆虫サイボーグは体のバランスをとるといった基礎的な動作は素体となる昆虫が行うため、それらに必要だった回路やセンサー等が必要なくなり、大きさのことも合わせて非常に省電力です。しかし、障害物のある砂地のような複雑な環境での制御は困難です。また、外部装置によるモーショントラッキングおよびその解析に依存せずに、昆虫サイボーグが障害物回避や環境の変化に伴う経路変更といった自律的ナビゲーションを行うことも同じく困難です。
研究の内容
本研究では、比較的単純な環境でしか使えないが、早く目的地に到達できる「Reach-Avoid Navigation」アルゴリズムと、より複雑な環境でも「壁を上る」という素体となっている昆虫特有の能力を活かし、目標地点への到達には時間がかかるものの柔軟に対応できる「Adaptive Reach-Avoid Navigation」の2種類のアルゴリズムを開発しました。
どちらのアルゴリズムも、目的地と現在地の座標情報をモーショントラッキングシステムから昆虫サイボーグに送り、搭載されているセンサーのデータと統合して積載デバイスのみで処理を行ったあと、昆虫サイボーグに刺激を与えます。その刺激に合わせて「目標地点の方向を向く」、「障害物を回避する」、「壁沿いを移動する」、または「自由行動(刺激がない場合)」といった行動を昆虫自身の能力で実現します。これを繰り返すことによって、昆虫サイボーグが目的地まで到達することができるようになりました。転倒からの立ち直りや凹凸のある砂地を進むことといった純粋なロボットでは難しい課題も、昆虫に本来備わっている力によって解決しました。
図2. (A)比較的簡単な実験フィールド (B)より複雑な実験フィールド
(C)(D)それぞれの実験フィールドにおける昆虫サイボーグの目的地到達までの軌跡
本研究成果が社会に与える影響(本研究成果の意義)
本研究成果により昆虫サイボーグが荒野のような不整地でも活動できるようになり、さらに搭載した装置のみで処理が完了するため、昆虫サイボーグを研究室外で使うことが簡単になりました。このことから人が立ち入ることが危険な災害発生直後の現場確認や要救助者の早期発見、破壊の難しい歴史的な構造物の内部調査、狭い空間に配置されており人の目が届きにくい配管スペースなどのインフラ設備の点検などへの貢献が考えられます。
また、今回サイボーグの素体となった昆虫は低酸素・貧栄養でも活動可能であり、高密度で飼育可能であるため、火星の地表調査などの宇宙探査の先駆けにできる可能性があります。さらに、昆虫以外の生物サイボーグにこのアルゴリズムを適用し、深海探査などに役立つ可能性も考えられます。
特記事項
本研究成果は、2025年2月12日(水)4時(日本時間)に米国科学誌「Soft Robotics」(オンライン)に掲載されました。
タイトル:“Biohybrid Behavior-based Navigation with Obstacle Avoidance for Cyborg Insect in Complex Environment”
著者名:Mochammad Ariyanto, Xiaofeng Zheng, Ryo Tanaka, C. M. Masum Refat, Nima Hirota, Kotaro Yamamoto, Keisuke Morishima
DOI: https://www.liebertpub.com/doi/pdf/10.1089/soro.2024.0082
なお、本研究は内閣府ムーンショット型研究開発制度「2050年までに、AI とロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」(JPMJMS223A) 及び科研費基盤研究S(22H04951)の支援を受けて行なわれました。
参考URL
SDGsの目標


用語説明
- 昆虫サイボーグ
素体となる昆虫に小型の制御用電子基板を載せ、昆虫に電気刺激を送れるようすることで行動を制御できるようにしたもの。
- 自律的なバイオハイブリッドナビゲーション
生物本来の能力を活用し、外部からの指示ではなく、自分で考えて動く能力を持つナビゲーションシステムのこと。周囲の情報を収集し、その情報を基に進行方向を決めたり、障害物を避けて目的地までのルートを決定する。移動やトラブルへの対応などは素体となる生物自身が持つ能力によって実現する。