この研究についてひとこと
不安定性とは、ロボットの制御では一般的に排除すべきものですが、例えば戦闘機では空力的な不安定性を積極的に利用して機動性を向上させることがあり、生物の運動制御でも不安定性を積極的に利用していると示唆されています。多足ロボットのような複雑な対象であったとしても、それに応じた複雑な運動計画や制御を考えるよりも、力学特性を利用したシンプルな運動計画や制御を考えることが重要です。そうすることで、ロボットだけでなく生物の歩行の本質を理解することが可能になり、さらには様々な応用にもつながると考えて研究を実施しています。

青井伸也
- 基礎工学研究科
- 教授
歩行の不安定化は役に立つ!?
多足ロボットの機敏な歩行を実現する新技術
研究成果のポイント
- 不安定性を利用することで多足ロボットの機敏で効率の良い歩行の実現に成功
- 環境と複雑に相互作用する多くの足の運動計画や制御の問題に対して、直線歩行の安定性を制御する機構を導入し、通常排除する不安定性をむしろ積極的に利用することで機敏な歩行を実現可能にした
- 惑星探査や災害現場のような人が立ち入ることの難しい場所など様々な状況での利用に向けた応用へ期待
概要
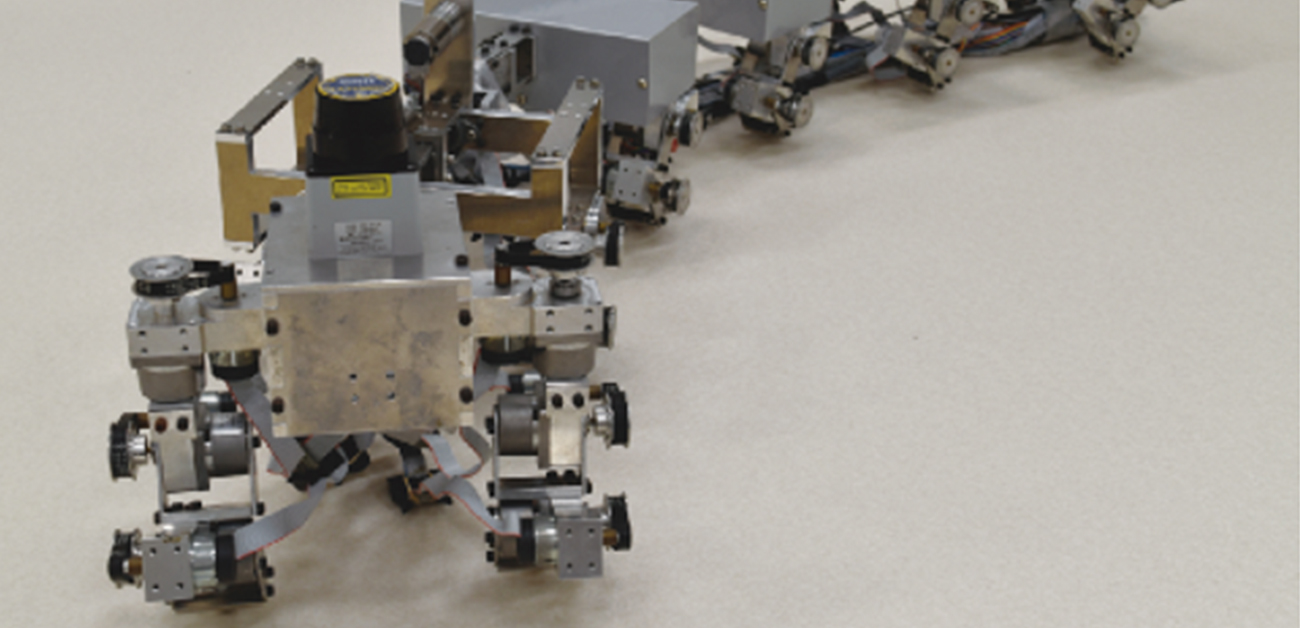
大阪大学大学院基礎工学研究科の青井伸也教授の研究グループは、不安定性を利用した多足ロボットの機敏で効率の良い歩行の実現に成功しました(図1)。
多足ロボットは、多くの足を持つために耐故障性や転倒回避性に優れており、様々な場所で活用できると期待されています。しかしながら、環境と複雑に相互作用する多くの足の運動計画や制御は難しく、その実現は困難でした。特に、地面につけている多くの足が障害となり、急旋回のような機敏な運動を行うことは至難の業でした。
青井伸也教授の研究グループでは、回転バネにより柔軟な体軸を持つ多足ロボットにおいて、そのバネ剛性をパラメータとするピッチフォーク分岐によって直線歩行が不安定化し、剛性に依存した半径を持つ円歩行に遷移することを明らかにしていました(Aoi et al., 2022)。今回、その剛性を変化させる機構をロボットに搭載することで直線歩行の不安定化を自在に引き起こし、さらにそれによって遷移する円歩行の半径を制御することで、機敏で効率の良い歩行の実現に成功しました。これにより、惑星探査や災害現場のような人が立ち入ることの難しい場所など、様々な状況での利用に応用されることが期待されます。
本研究成果は、米国科学誌「Soft Robotics」に、2023年5月29日(月)13時(日本時間)に公開されました。
図1. 多足ロボット
研究の背景
多足ロボットは、多くの足を持つために耐故障性や転倒回避性に優れており、様々な場所で活躍できると期待されています。しかしながら、環境と複雑に相互作用する多くの足の運動計画や制御は難しく、その実現は困難でした。特に、重力に抗して体重を支えるために、歩行中は多くの足を地面につけておく必要があるのですが、それらの足が地面に拘束されてしまうことが障害となり、急旋回のような機敏な運動を行うことは至難の業でした。
研究の内容
青井伸也教授の研究グループでは、回転バネを用いた柔軟な体軸を持つ多足ロボットにおいて、そのバネ剛性をパラメータとするピッチフォーク分岐によって体軸を真っ直ぐにして歩く直線歩行が不安定化し、剛性に依存した半径を持つ円歩行に遷移することを明らかにしていました(図2)。運動の不安定性はその運動を継続できないことを意味するため、それを排除するように制御系を設計するのが一般的ですが、本研究グループでは、この不安定性を別の運動へと素早く遷移させる駆動力に利用できないかと考えました。そこで今回新たに体軸の回転バネ剛性を変化させる機構(図3)をロボットに搭載することで直線歩行の不安定化を自在に引き起こし、さらにそれによって遷移する円歩行の半径を目的とする場所に到達するように制御することで、複雑な計算を必要とせず、エネルギー消費も少ない、多足ロボットの機敏で効率の良い歩行の実現に成功しました。
図2. 多足ロボットの体軸の回転バネ剛性に応じた安定な歩行の変化
図3. 多足ロボットの体軸の剛性を変化させる機構(A.側面、B.上面、C.上面概要図)。ボールねじを用いてバネの伸び縮みを制御することで体軸関節の剛性を変化させる。
本研究成果が社会に与える影響(本研究成果の意義)
本研究成果により、多足ロボットの機敏で効率の良い歩行を実現することが可能になりました。将来的には、人が立ち入ることの難しい場所で人に代わって作業するなど、様々な状況での利用に応用されることが期待されます。また、シンプルな制御ながら不安定性や分岐などの力学特性を利用した運動機能の向上は、今後様々な人工物の開発に役立ち、生物の優れた運動戦略の理解にも重要な示唆を与えると期待されます。
特記事項
本研究成果は、2023年5月29日(月)13時(日本時間)に米国科学誌「Soft Robotics」(オンライン)に掲載されました。
タイトル:“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”
著者名:Shinya Aoi, Yuki Yabuuchi, Daiki Morozumi, Kota Okamoto, Mau Adachi, Kei Senda, and Kazuo Tsuchiya
DOI: https://doi.org/10.1089/soro.2022.0177
なお、本研究の一部は、JST創発的研究支援事業 JPMJFR2021、JSPS科研費 JP17H04914、JP19KK0377、JP20H00229、稲盛財団の支援を受けて行われました。
参考URL
青井 伸也 教授 研究者総覧
https://rd.iai.osaka-u.ac.jp/ja/90b3032f623095b4.html
大阪大学大学院基礎工学研究科 機能創生専攻生体工学領域 青井研究室
https://mechbiosys.me.es.osaka-u.ac.jp
SDGsの目標

用語説明
- ピッチフォーク分岐
パラメータの変化に応じて、安定であった平衡解が不安定化し、別の二つの安定な平衡解が出現すること。横軸をパラメータ、縦軸を解の状態とした分岐図を書くと三叉となり、熊手(ピッチフォーク)のように見える(図2参照)。