
新説を実証!ヒトはどのように姿勢を安定化させるのか?
若年・高齢健常者及びパーキンソン病患者での姿勢制御メカニズムの違いを明らかに。
研究成果のポイント
・若年健常者、高齢健常者、パーキンソン病 患者の姿勢制御メカニズムの違いを明らかに。若年・高齢健常者およびパーキンソン病患者から計測した各個人の静止立位姿勢動揺データに対してデータ同化 解析を行い、各個人の動揺を再現する非線形制御系を同定することで解明。
・健常者の立位姿勢はスイッチド・ハイブリッドシステムと呼ばれる非線形制御(間欠制御 )によって安定化されていること、また、高齢者やパーキンソン病患者における姿勢の不安定化は適切なスイッチが行われなくなることに起因することを、世界ではじめて明らかに。
・そもそも、ヒト静止立位姿勢の神経制御メカニズムの従来仮説の妥当性には疑義があった。非線形制御モデルを実データに同化するためには膨大な計算が必要で、それを実施できる高性能コンピュータが容易に利用できる時代になったことで、今回の成果を得た。・本研究の成果によって、高齢者やパーキンソン病患者の転倒リスクを個別に評価する新技術(パーソナライズドヘルスケア技術)の開発に繋がることに期待。
概要
大阪大学大学院基礎工学研究科の鈴木康之講師、野村泰伸教授らの研究グループは、若年・高齢健常者およびパーキンソン病患者を含む数百人から計測した静止立位姿勢動揺データの個々に対してデータ同化解析を行い、各個人の姿勢変動を統計的に最もよく再現する姿勢制御モデルを同定しました。その結果、健常者の立位姿勢はスイッチド・ハイブリッドシステムと呼ばれる非線形制御(間欠制御 )によって安定化されていること、および、高齢者やパーキンソン病患者における姿勢の不安定化は適切なスイッチが行われなくなることに起因することを、世界ではじめて明らかにしました。
ヒト静止立位姿勢の神経制御メカニズムの研究の歴史は神経生理学の中でも最も古い部類に位置付けられます。しかし、実は、そもそも、こうした歴史の中で定説とされてきた姿勢制御メカニズムの仮説の妥当性には疑義がありました。研究グループは、10年ほど前にこのことを指摘し、新しい制御仮説(間欠制御仮説)を提案するとともに、その妥当性の検証を進めてきました。これらの検証は、国立病院機構刀根山医療センターや阪大病院等との共同研究で実施され、その間、多くのパーキンソン病患者や高齢健常者の姿勢動揺データを収集しました。こうして得られた多数のデータ、我々が提案する新しい姿勢制御モデルに加え、高速演算が可能な高性能コンピュータが手軽に利用できるようになり、モデル・データ両駆動型解析 が可能になったことが、今回の研究成果に繋がりました。
高齢者、神経疾患患者、運動器に疾患がある患者の転倒リスクの評価は、一見簡単なように感じられますが、実は難しい課題で、現在のところ、満足のいく転倒リスク評価指標の開発は達成されていません。本研究の成果によって、高齢者やパーキンソン病患者の転倒リスクを評価する新技術の開発に繋がることが期待されます。
本研究成果は、米国物理学協会の非線形学際科学誌「Chaos」に、11月25日(水)に公開されます。

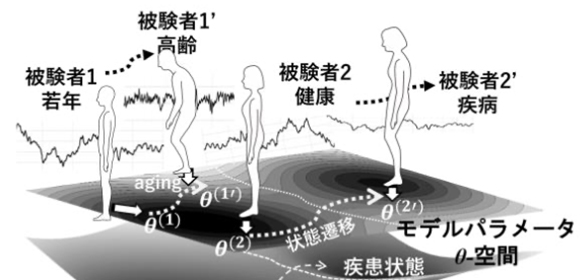
図1 加齢や疾病に伴う立位姿勢制御系のパラメータの変遷と姿勢動揺(姿勢状態)の遷移
研究の背景
これまでの仮説では、ヒト静止立位は単純な線形フィードバック制御で安定化されていると考えられてきました。この従来モデルでは、立位姿勢は頑強に漸近安定化されてしまいます。そのため、実際のヒトが、静かに立位を維持している際の姿勢動揺(重心動揺)をモデルで再現するためには、特定の時間相関を有する非常に大きな内的ノイズ源を仮定する必要がありました。また、ヒトの感覚フィードバックに存在する信号伝達時間遅れに起因する不安定化を回避するために、線形フィードバック制御器のゲインは限られた範囲内の大きな値にチューニングされる必要がありました。大きなゲインは過大なエネルギー消費や関節の剛直化の要因となります。これらの性質は、ヒトの立位姿勢安定化戦略としての従来モデルの妥当性を疑わせる要因でした。
ヒトの立位姿勢は比較的大きな振幅で動揺しています。これは立位姿勢時の身体の関節が柔軟性を有していること、および、それにも関わらず、様々な環境の変化に対してもヒトは頑健(ロバスト)に立位姿勢を維持できることを意味します。そこで、野村教授らの研究グループは、従来仮説で用いられてきた線形フィードバック制御の仮定自体が不自然であると考え、姿勢の柔軟性と頑健性を自然に達成できる仕組みとして、立位姿勢の間欠制御仮説を世界に先駆けて提案しました(2008、2009、2012)。
間欠制御は非線形制御の一種で、立位姿勢に依存した適切なタイミングで、線形フィードバック制御が、一時的かつ間欠的に停止します(制御のスイッチが一時的かつ間欠的にオフになります)。通常、姿勢を安定化するためのフィードバック制御をオフになどしたら、姿勢は不安定化してしまうのではないかと思われるかもしれませんが、実際はその逆のことが起こります。すなわち、間欠的に制御をオフにした方が、姿勢の柔軟性を保ったまま、より頑健に姿勢を安定化できることを、まず理論的に明らかにしました(2009、2013)。
今回の研究成果は、こうした理論モデルの妥当性を、実際のヒトの立位姿勢動揺データに基づき、定量的に示しました。さらに、今回の研究の重要性は、間欠制御仮説の検証を、若年健常者の姿勢動揺のみならず、高齢健常者および姿勢機能に障害のあるパーキンソン病患者の姿勢動揺の計測データも用いて実施した点にあります。興味深いことに、若年健常者の姿勢動揺は、間欠制御モデルによって統計的に最も良く再現(説明)されたのに対して、一部の高齢健常者や姿勢障害の重症度が高いパーキンソン病患者の姿勢動揺は、従来モデルによって統計的に最も良く再現されることが示されました。従来モデルの姿勢制御様式は、例えば二足歩行ロボット等の姿勢の安定化にも用いられていますが、高齢者や姿勢障害のある患者の立位姿勢は、ロボットの立位姿勢と同様に、剛直に安定化されていたことになります。一方、若年健常者の姿勢は、間欠制御によって、高いエネルギー効率で、柔軟性を保ちながらしなやかに安定化されていることが明らかになりました。
2008: Bottaro et al. Human movement science 27 (3), 473-495
2009: Asai et al. PLoS One 4 (7), e6169
2013: Suzuki et al. Journal of Theoretical Biology 310, 55-79
2013: Nomura et al. Mathematical biosciences 245 (1), 86-95
本研究成果が社会に与える影響(本研究成果の意義)
姿勢や歩行、あるいは老人学の最新の研究によって、静止立位時の姿勢動揺の時間的変動パターン、中でも制御システムの非線形性と関係があると予想される特徴的な性質と、日常生活中の転倒履歴に相関があることが明らかにされつつあります。本研究の成果は、そうした特徴的な変動パターンを生成する神経制御メカニズムの一端を解明したものと言えます。今後、本研究の成果を応用することで、高齢者やパーキンソン病患者の日々の転倒リスクを、姿勢制御系のメカニズムの理解に基づいて、個々人毎に定量評価する新技術(パーソナライズドヘルスケア技術)の開発に繋がることが期待されます。
特記事項
本研究成果は、2020年11月25日(水)に米国物理学協会の非線形学際科学誌「Chaos」(オンライン)に掲載されます。
タイトル:“Postural instability via a loss of intermittent control in elderly and patients with Parkinson’s disease: a model-based and data-driven approach”
著者名: Yasuyuki Suzuki, Akihiro Nakamura, Matija Milosevic, Kunihiko Nomura, Takao Tanahashi, Takuyuki Endo, Saburo Sakoda, Pietro Morasso and Taishin Nomura
論文誌名:Chaos, Vol. 30, 2020.
DOI: 10.1063/5.0022319
また、本論文は当該論文誌を代表するベスト論文の1つとして、Featured Articleに選定され、かつその内容を紹介する記事が、米国物理学協会ソーシャルメディアプラットフォーム「Scilight」に掲載されることになりました。
なお、本研究は、JSPS科学研究費補助金等の支援を受けて行われました。
研究者のコメント
野村教授
生理学の教科書には、ヒト立位姿勢はふくらはぎの抗重力筋の持続的活動と伸張反射に因る足関節の高剛性(筋・腱のバネ的性質)によって安定化されると書かれている。10年前、申請者らはこの古典的定説と対立する間欠制御仮説を提案し、国際的に注目されてきた(残念ながら国内的にはあまり認知されていないが)。当初、伝統的な神経生理学者はこの新仮説に否定的であったが、一方で仮説を記述する制御モデルが生成する興味深いダイナミクスが、非線形物理科学分野の研究者から高く評価され、多くの論文に引用された。今回の研究成果によって、姿勢制御メカニズムが古典的定説から我々の新仮説(間欠制御)に刷新される流れが大きくなること期待している。
参考URL
基礎工学研究科 野村研究室HP
http://www3.bpe.es.osaka-u.ac.jp
用語説明
- パーキンソン病
手の震え、動作や歩行の困難、姿勢の不安定化などの運動障害を示す進行性の神経変性疾患。進行すると自力歩行も困難となり、車椅子や寝たきりになる場合がある。40歳以上の中高年の発症が多く、特に65歳以上の割合が高い。アルツハイマー病と並んで頻度の高い神経変性疾患で、日本では難病(特定疾患)に指定されている。
- データ同化
(data assimilation):
モデルシミュレーションとデータサイエンスを融合することで、より精度の高い予測分析を行う手法のこと。本研究では、姿勢制御の動態モデルを仮定し、モデルの振舞い(モデルの姿勢動揺)が個々の被験者に対する姿勢動揺を統計的に尤も良く再現するようなモデルのパラメータ(例えば、フィードバックのゲインや時間遅れ、制御のスイッチオン・オフを決めるパラメータ、ノイズの強度など)の確率分布をベイズ推論を用いて決定した。
- 間欠制御
間欠制御は非線形制御の一種で、立位姿勢に依存した適切なタイミングで、線形フィードバック制御が、一時的かつ間欠的に停止します(制御のスイッチが一時的かつ間欠的にオフになります)。姿勢を安定化するためのフィードバック制御をオフにすれば、姿勢は不安定化してしまうと思われるかもしれませんが、実際はその逆のことが起こります。我々は、間欠的に制御をオフにした方が、姿勢の柔軟性を保ったまま、より頑健に姿勢を安定化できることを、これまでの先行研究で理論的に明らかにしています。
- モデル・データ両駆動型解析
データ駆動型解析(データドリブン解析)は、ディープラーニング等の機械学習をはじめとするデータサイエンスの解析のことを言います。一方、モデルベースドの研究では、物理原理や現象論的仮説に基づき、現象を支配する微分方程式モデルを構築し、数値シミュレーション等によってモデルのダイナミクスを解析します。データ駆動型解析は、対象とするシステムをブラックボックスとしたまま、システムが生成・出力するデータのみを解析するのに対して、モデルベースド解析は、対象とするシステムを具体的にモデル化(ホワイトボックス化)します。モデル・データ両駆動型解析は両者の特徴を融合したもので、ポストデータサイエンスのキーテクノロジーと考えられています。