
Differences in the mechanisms of postural stability between healthy people and Parkinson’s patients clarified
A group of researchers from Osaka University analyzed data on postural sway of upright posture during quiet stance from healthy individuals both young and elderly as well as patients with Parkinson’s disease and identified an intermittent control model that can statistically and optimally reproduce a diverse set of spontaneous postural sway data.
As a result, the group demonstrated that upright posture during quiet stance of healthy people was stabilized by intermittent control and that the unstable standing postures in the elderly subjects and patients with Parkinson’s disease were caused because switching between the off-subsystem (open-loop control system) and the on-subsystem (closed-loop control system) was not properly performed.
Despite flexibility in some joints, humans acquire postural robustness to remain in an upright posture and maintain balance while standing thanks to postural sway. Around ten years ago, this group proposed a hypothesis that intermittent control allows for flexibility and robustness of the upright posture. Intermittent control is temporarily and intermittently switched off at an appropriate timing depending on one's upright posture. The switching function is implemented in such a way that the feedback controller is switched off when the state vector of the inverted pendulum is near the stable manifold of the saddle and switched on otherwise.
In this study, the group theoretically clarified that intermittent control can stabilize upright posture while maintaining the flexibility of the postures and quantitatively demonstrated the validity of their theoretical model based on the actual human upright posture sway data.
This group also verified their intermittent control hypothesis using upright posture measurement data of healthy young adults, healthy elderly people, and Parkinson’s disease patients with severe postural instability. The upright posture sway of young healthy subjects was statistically reproduced (described) by the intermittent control model, while that of some healthy elderly people and Parkinson’s disease patients with severe postural instability was reproduced by the traditional continuous control model with no intermittency. This means that upright posture in the elderly and patients with severe postural instability was rigidly stabilized just like postural stability of upright robots. Healthy young participants were stabilized by the intermittent control model, which was considered highly energetically efficient.
It is difficult to evaluate fall risks in older adults and patients with neurological disorder or locomotor disorders, so a sufficiently accurate risk fall index has not been developed. This group’s achievements are expected to lead to the development of new technology to evaluate fall risk in the elderly and people with Parkinson’s disease. By applying their research results, it will become possible to develop personalized healthcare technology to quantify fall risk in the elderly and people with Parkinson’s disease based on an understanding of posture control mechanisms.
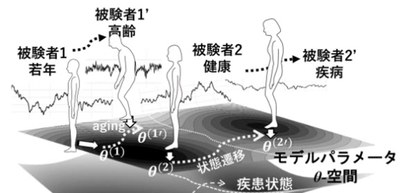
Figure 1
The article, “Postural instability via a loss of intermittent control in elderly and patients with Parkinson’s disease: a model-based and data-driven approach,” was published in Chaos at DOI: https://doi.org/10.1063/5.0022319.