
微小な磁石の群れを“指揮”する新技術!!
磁性マイクロロボットの集団運動制御等への応用に期待
研究成果のポイント
・格子状に配置された磁石の集団的な回転パターンを外部磁場により制御する手法を発見
・これまで同一の動きしかできないと考えられていた磁気回転子 から豊かな集団運動を引き出す手法を発見
・磁性マイクロロボットへの活用、特にマイクロスケールのポンプ、ミキサー開発応用に期待
概要
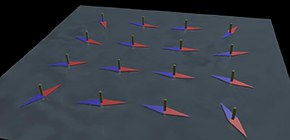
大阪大学大学院基礎工学研究科の松永大樹助教とRamin Golestanian教授(ラミン・ゴレスタニアン;マックス・プランク研究所,ドイツ)、Julia M. Yeomans教授(ジュリア・ヨーマンス;オックスフォード大学,イギリス)、Feodor Ogrin准教授(フェオドア・オグリン;エクセター大学,イギリス)らの研究グループは、格子状に配置された磁気回転子の集団 (図1) の回転パターンを制御する方法を明らかにしました。
近年、微小な磁性粒子を用いた小さなロボット(磁性マイクロロボット)の研究が盛んになっています。これらの磁性ロボットは外部からの磁場により遠隔から移動方向を制御することができるため、体内を移動する治療ロボットへの応用などで注目を集めていますが、これらの磁性粒子が多数存在するときその集団的な振る舞いを如何にコントロールするかが課題として挙げられてきました。
今回、松永助教と国際共同研究チームは、理論・数値計算・実験を融合した解析を行うことにより磁気回転子が様々な集団回転運動を見せることを明らかにしました。全ての回転子に同一の磁場を負荷しているにも関わらず回転子が異なる運動を示す珍しい例の発見であり、この成果は磁性ロボットの集団運動制御やマイクロスケールのポンプ・ミキサー開発に応用できると期待されています。
本研究成果は、英国科学誌「Nature Communications」に、10月16日(水)18時(日本時間)に公開されました。
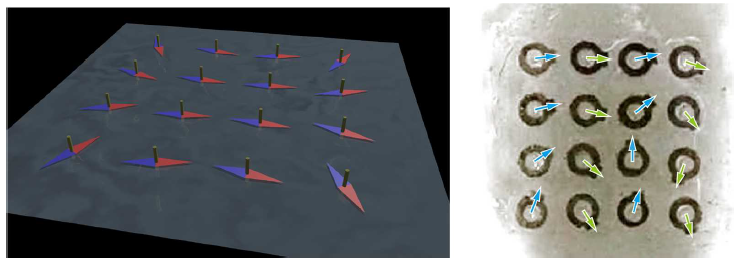
図1 格子状に配置された磁気回転子の概念図(左図)と実験の様子(右図)
研究の背景
近年、微小な磁性粒子(磁性コロイド )を用いた小さなロボットの研究が盛んになっており、様々な磁性マイクロロボットが開発されています。これらの磁性ロボットは外部からの磁場により遠隔から移動方向を制御することができるため、体内を移動する治療ロボットやドラッグデリバリーシステムなどに応用できるのではないかと期待されています。実際にここ数年ではマイクロ粒子の輸送を行う磁性ロボットや、磁性ロボットによる人工授精システムの開発が進んでいます。磁性粒子はコンパスが北を指すように磁場方向へ向こうと回転する性質を持っており、磁性ロボットはこの性質を利用し作動します。外部磁場を「指揮者」だとすると、磁性粒子はまるで指揮に従って動く演奏者のようです。
ここで、マイクロロボットがもし多数で「群れ」のように集団として存在したとき、それぞれのロボットに別々の指示を伝えることは可能でしょうか?例えば二体の磁性ロボットのうち一体には「時計周りに回転せよ」と指示する一方で、もう一体には「反時計周りに回転せよ」と伝えることはできるでしょうか。外部磁場により与えたシグナル(指示)は基本的には二体のロボットに等しく渡ってしまうため、このように異なる指示を与えることは困難であると考えられてきました。翻って自然界では渡り鳥が隊列を組んだり、魚の群れがあたかも一体の大きな生き物かのように振る舞ったり、集団として表情豊かな運動(集団運動)を見せることが知られています。人工的な磁性ロボットの「群れ」では全ての個体が同一の動きをすることしかできず、表情豊かな集団運動を指示することはできないでしょうか?
本研究の成果
今回、松永助教とオックスフォード大学、エクセター大学、マックス・プランク研究所の研究グループは磁気回転子が様々な集団運動を見せることを明らかにし、上記の課題の一つの解決方法を提案しました。磁気回転子とは 図1 のように空間に固定されその場の回転運動のみ許された磁性粒子です。碁盤の目のように配置された4×4の磁気回転子に対し外部から磁場を印加し、その集団回転運動のパターンを分析しました。その結果、システム全体に対して同一のシグナル(一方向の振動磁場)を与えているにも関わらず、 図2 のように時計回りに回転し続ける回転子と反時計回りに回転し続ける回転子が同時に現れる条件があることがわかりました。これらの異なる回転は、外部磁場に加えて回転子同士に働く磁気相互作用を活かすことによって生じる現象です。また条件を注意深く変化させると時計回りと反時計回りの回転パターンが複雑な模様を形成し、外部磁場の強さと周波数を変えることにより回転パターンを制御できることがわかりました (図2) 。これらの回転パターンを制御することにより周囲に複雑な流れを生み出すこともできます。
今回の成果は全ての回転子に同一の磁場を負荷しているにも関わらず回転子が異なる運動を示す珍しい例の発見であると言えます。この結果は、外部磁場の条件(磁場の強さ・周波数)を変化させるだけで、磁気回転子の集団運動をコントロールできたことを意味しており、小さな磁石の群れを磁場というタクトで「指揮」したとも言えるのかもしれません。

図2 磁気回転子の集団回転パターンと誘起される流れ場
本研究成果が社会に与える影響(本研究成果の意義)
近年はLab-on-a-chip技術やマイクロ流体デバイスなど、流体力学を応用した小型チップによる診断デバイスの開発が盛んに進められています。今回開発された技術は磁性ロボットの集団運動制御だけでなく、マイクロ流体デバイス上で働くミリサイズ・マイクロサイズのポンプや撹拌機(ミキサー)への応用も期待されます。
研究者のコメント
この現象を発見したのは偶然で、本来は違う問題を解析するために書いた数値計算プログラムの分析中、未知のパターンを見い出したことが研究の始まりでした。偶然から始まり徐々に多分野の専門家に加わってもらい、多角的な視点から成果をまとめられたことを嬉しく思います。
特記事項
本研究成果は、2019年10月16日(水)18時(日本時間)に英国科学誌「Nature Communications」(オンライン)に掲載されました。
タイトル:“Controlling collective rotational patterns of magnetic rotors”
著者名:Daiki Matsunaga, Joshua K. Hamilton, Fanlong Meng, Nick Bukin, Elizabeth Martin, Feodor Y. Ogrin, Julia M. Yeomans and Ramin Golestanian
なお、本研究は、EU Horizon 2020プロジェクト・”ABIOMATER: Magnetically Actuated BIO-inspired metaMATERials”( https://blogs.exeter.ac.uk/abiomater/ )の一環として行われました。
参考URL
大阪大学 大学院基礎工学研究科 機能創成専攻 生体工学領域 生体計測学講座 分子生体計測グループ
http://mbm.me.es.osaka-u.ac.jp/
用語説明
- 磁気回転子
磁石としての性質を持ち、磁場によって回転する物体。今回の実験ではリング状に作成した磁石を格子状に配置した柱へと通し、配置することによりシステム (図1) を構築しました。
- コロイド
(磁気コロイド):
マイクロサイズの微小粒子が気相・液相中などに分散した状態。磁性コロイドは、コロイドのうち磁石としての性質を持ったもの。