
Magnetic particle control method enabling control of collective motion of magnetic microrobots
A group of researchers from Osaka University, the Max Planck Society for the Advancement of Science (Germany), University of Oxford (UK), and University of Exeter (UK) demonstrated a method for controlling collective rotational patterns of a 4×4 square rotor array.
Magnetic rotors are fixed in position and rotate in that position. In recent years, ferrofluid micro robots using magnetic colloids have been actively studied. Microrobots controlled by magnetic fields have gained use recently because they can be controlled remotely using magnetic forces. They are expected to be used as medical microrobots for treatment and therapeutic delivery of drugs. In fact, the development of magnetic microrobots to transport micro particles and artificial fertilization system using magnetic robots is already underway.
Magnetic particles rotate to move to a magnetic field and magnetic robots are actuated with magnetic fields, but controlling collective behavior of magnetic particles is challenging. This group demonstrated that magnetic rotors had different collective dynamical modes using experiments, simulations, and theoretical arguments.
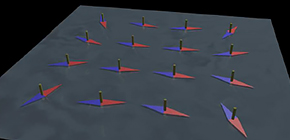
In this study, the group externally applied a magnetic field to a 4×4 square rotor array, analyzing its collective rotational patterns. Although the same oscillatory external magnetic field was applied, some rotors rotated clockwise while others rotated counter-clockwise. These different rotations occur by using both an external magnetic field and the dipolar interactions between the rotors. This means that the collective motion of magnetic rotors can be controlled simply by changing the strength and frequency of the external magnetic field.
This group demonstrated complex dynamics in the rotational patterns, or the pattern of clockwise and counter-clockwise rotations, by carefully changing conditions. By controlling these rotational patterns, it is also possible to produce an extensional flow.
In recent years, microfluidic devices for diagnosis, such as lab-on-a-chip systems and microfluidic devices, are being developed. This group’s method will be used not only for collective motion control of magnetic robots but also millimeter- and micro-sized pumps and mixers on microfluidic devices.
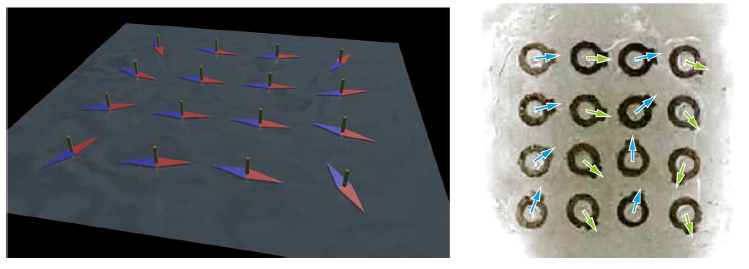
Figure 1
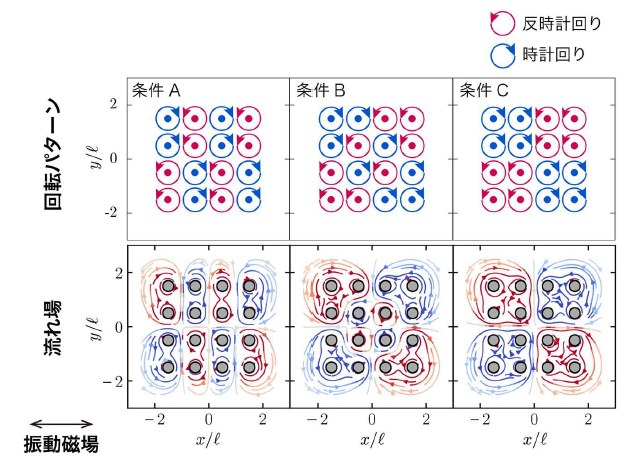
Figure 2
The article, “Controlling collective rotational patterns of magnetic rotors,” was published in Nature Communications at DOI: https://doi.org/ 10.1038/s41467-019-12665-w .