この研究についてひとこと
無限定環境の中で運用する人工物は、環境と戦ってはいけません。戦いを挑むと作用反作用の法則によって環境からしっぺ返しを喰らいます。したがって「柔らかく」でも「芯をもつ」ことが重要です。これが「開いた設計」の極意です。

大須賀 公一
- 工学研究科
- 教授
分離合体ロボット「i-CentiPot-Ammonite」と 汎用搬送コンテナ「BRAINS」を新開発
革新的な災害対応システムの提案
研究成果のポイント
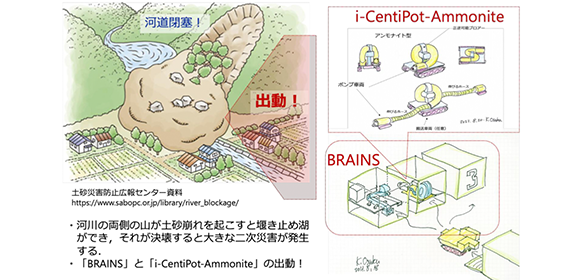
- 無限定環境である災害現場において、その場で「必要に応じて組み替えられる新しい分離合体排水用ロボットi-CentiPot-Ammoniteと、そのような機体を搬送するための汎用搬送コンテナBRAINS(Base containeR with open design Adaptive INtegration System)」の原理モデル(図1右)を試作し、実現可能性を示した。
- 「行ってみないとわからない、汎用大型建機が行けない、軟弱地盤が支配的」という山岳地帯の災害現場では、従来の大きくて重い建機は不向きである。しかし、河道閉塞(図1左参照)などの自然災害においては、人間が危険を冒して従来建機を現場まで搬入して作業している。
- ヘリコプターで空輸できる小型サイズの分離型ロボット群が、現場で相互に臨機応変に合体して、所望の性能を発揮する土工の革新の構成法を提案。これは「臨機応変に組み替えられる革新的な災害対応システム」である。
- 本提案が実証機レベルにまで進化すれば、災害現場における二次災害の発生を大きく防ぐことができるようになると期待される。
図1. 河道閉塞現場と今回開発しているロボットのイメージ図
概要
大阪大学大学院工学研究科 大須賀公一教授らの研究グループは、「河道閉塞」という災害を想定し、「開いた設計」を意識して、「分離合体することができる災害対応ロボット(i-CentiPot-Ammonite)」と「分離合体ロボットを搬送する汎用搬送コンテナ(BRAINS)」の原理検証モデルを試作し、その実現可能性を示しました。
研究グループは、「ムーンショット型研究開発プロジェクト」の中で無限定環境(未知で時間とともに変化する環境)における革新的な土工機の開発のために「開いた設計」という設計思想を提案しています。これは、従来の工学では、境界条件がうまく設定できないが故に、うまく取り扱えなかった設計問題に対して、「身体と現場の環境が渾然一体化することでシステムが完成するという考え方」を導入した新しい設計思想です。人工物の「開いた設計」におけるポイントはシステムが「環境と戦わない」思想であり、そのための具体的な設計指針は「分離合体する」「柔らかい」「群れる」です。それに対して、これまでの様々な土工機は、これらのポイントとは真逆で「個体」「硬い」「単独」が基本なので災害現場ではなかなかうまく使えませんでした。
今回の研究成果により、5年以内に、「開いた設計の思想に基づいて開発された革新的災害対応システムの実証機」が実現できることが期待できます。
本研究成果は、2024年5月14日―16日に横浜(PACIFICOYOKOHAMA)で開催される「2024 IEEE International Conference on Robotics and Automation(ICRA2024)」で展示され、2024年5月24日―26日に大阪(大阪工業大学梅田キャンパス)で開催される「第68回システム制御情報学会研究発表講演会」で発表されました。
開発の背景
河道閉塞などの自然災害の現場では、人が重機を現場まで搬入して作業しています。図2は河道閉塞が発生した災害現場における従来の作業現場の一例です。このように、現状では人が危険を冒して有人建機を用いて複数のポンプを設置して排水しています。しかし、山岳地帯の災害現場は「行ってみないとわからない、汎用大型建機が行けない、軟弱地盤が支配的」という特徴を持っており、大きくて重い建機は現場に不向きで危険を伴う場面も多々あります。そこで革新的な災害対応システムが必要になります。
研究グループは、「ムーンショット」プロジェクトの中で
無限定環境(未知で時間とともに変化する環境)における革新的な災害対応システムの開発のために「開いた設計」という設計思想を提案しています。これは、従来の工学では、境界条件がうまく設定できないが故に、うまく取り扱えなかった設計問題に対して、「身体と現場の環境が渾然一体化することでシステムが完成するという考え方」を導入した新しい設計思想です。人工物の「開いた設計」におけるポイントはシステムが「環境と戦わない」思想であり、そのための具体的な設計指針は「分離合体する」「柔らかい」「群れる」です。それに対して、これまでの様々な土工機は、これらのポイントとは真逆で「個体」「硬い」「単独」が基本なので災害現場ではなかなかうまく使えませんでした。
図2. 河道閉塞現場での作業例
i-CentiPot-AmmoniteとBRAINSの開発
「開いた設計」の思想のもと、私達は「分離合体できる小型作業ロボットを災害現場で至適に組み合わせて災害対応を実施する」という「革新的な災害対応システム」を提案します。今回は具体的に二つのロボット(i-CentiPot-AmmoniteとBRAINS)を開発し、その実現可能性を示します(図1右と図3)。
まず「分離合体ロボットi-CentiPot-Ammonite」は、「移動車両(クローラ車両)」と「作業機(親機・子機)」が分離合体できる構成になっています。さらにホースは蛇腹式になっており、将来的には内部に空気を出し入れすることで能動的に伸縮するホースになり、長尺化が実現できるようになります。また、子機1にポンプ機能を付加するようになります。それによって、河道閉塞などの災害現場で別の移動車両などと必要に応じて合体し直すことができ、臨機応変な対応ができる災害対応システム(排水ロボット)が得られます。
そして「汎用搬送コンテナBRAINS」は、i-CentiPot-Ammoniteをはじめとする分離合体ロボットを 収納し、ヘリコプターなどで空輸することができるコンテナシステムです。このようなコンテナを複数用意し、災害現場に空輸します。コンテナの内部には分離合体ロボットを収納することができるように、昇降台が付いています。それによって、さまざまな分離合体ロボットを運搬することができるようになります。
図3. i-CentiPot-Ammonite と BRAINS
今後の課題
今回は「土工の革新」の例として「革新的な災害対応システム」の一つの姿を、プロトタイプモデル(i-CentiPot-AmmoniteとBRAINS)を試作することで、具現化しました。注意していただきたいのは、ここでの成果は「方式の提案」であって、「実証機の開発」ではありません。今回の成果を受けて、今後5年かけて「実際にポンプを搭載した半自律的に運用できる実証機」を開発することがこれからの予定になります。
特記事項
本研究は、ムーンショット目標3「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現(PD福田敏男(名古屋大学)」の中の「多様な環境に適応しインフラ構築を革新する協働AIロボット:caféプロジェクト(PM永谷圭司(東京大学))」の中で行われています。
SDGsの目標







用語説明
- 無限定環境
無限定環境とは、想定環境の様子が未知で時々刻々変化する可能性がある、そんな環境を指し ます。そういう意味で「限定されていなくて予め予測できない環境」です。災害現場などはまさにこのような環境になっています。ちなみに、無限定環境の対義語は限定環境になります。文字通り、予め想定でき確定されている環境を意味します。例えば、通常の建物の中や平時の道路などがそれになります。
- 河道閉塞
河道閉塞は、地震や集中豪雨、火山噴火等に伴う山腹の地すべりやがけ崩れ、土石流などといった自然現象により、大量の土砂が河川の水の流れをせき止める現象あるいは地形のことであり、土砂ダムや天然ダムなどとも呼ばれます。これが決壊するとさらに大きな被害を生むことがあります。河道閉塞が生まれたらできるだけ早く、土砂ダムに溜まってきている水を下流に流さなくてはなりません。
- 土工の革新
狭い意味では現状のさまざまな建機などを改造することを指します。本研究ではそれを含めてもっと広い意味で捉えています。具体的には、現在の建機を一旦忘れて新しい工事様式を考え、その実現のための身体を考えます。作業機のみに限らず、移動機、台数、大きさなども含めたシステムの革新を想定します。
- ムーンショット型研究開発プロジェクト
ムーンショット型研究開発制度は、我が国発の破壊的イノベーションの創出を目指し、従来技術の延長にないより大胆な発想に基づく挑戦的な研究開発(ムーンショット)を推進する国の大型研究プログラムです。
- 開いた設計
人工物の設計において、従来は、いま作ろうとしている機械はどのような場面で使用するかが決まっています。この場合、設計する際に不可欠な境界条件が明確になっている(閉じている)ことが多いです。このような設計を、境界条件が閉じていると言う意味で「閉じた設計」と呼んでおきます。ところが、災害現場などで使用する機械は、災害現場が未知で変化するために、境界条件を予め定めることができません。すなわち境界条件が開いています。それでも私たちはなんらかの解(人工物)を作らなくてはなりません。しかしながら、このような設計法はこれまでの工学にはないので、私たちは「開いた設計」という新しい思想を構築してそれを設計論へと具現化しなくてはなりません。