この研究についてひとこと
昆虫は生き物であり、その反応は一匹ごと、その時々で変わる。これまでの生物サイボーグ研究は動物に「命令する」一方向だった。本研究は、人工システムが昆虫の状態をまず読み取ったうえで関わる、“状態に寄り添う生体ハイブリッド制御"の第一歩に挑戦。装着型デバイスでAIが昆虫自身の心拍・神経・動きを読み取り、適切なときだけ介入する。最大の売りは「操る」から「聴く」への転換である。これは結論ではなく始まりであり、将来の異種間対話に向けた基盤となる。
森島 圭祐
- 工学研究科
- 教授
\昆虫の「声」を聴き、制御する!/ 昆虫の体内信号をAIが読み取る 昆虫サイボーグ制御システムを提案・実証
研究成果のポイント
- 新たな昆虫サイボーグシステムとして生体内信号を制御へ活用する新コンセプト「Insect Synergy Circuit(ISC)」を提案し、昆虫の身体運動に加えて、生体内情報から推定した周囲環境の状態を統合し、それらを反映した制御を行う仕組みを開発。
- 従来は身体動作など外部から観察可能な情報のみに基づいて制御していたが、体内情報をAIで解析し、身体動作情報と組み合わせることで、昆虫への負荷を抑えた制御の実現に向けて重要な基盤を構築。
- ISCの概念は、昆虫以外の生物や各種センサーにも応用可能であり、生体とAIが協調する次世代サイボーグ技術への展開に期待。
概要
大阪大学大学院工学研究科 博士後期課程のChowdhury Mohammad Masum Refatさん、同研究科の森島圭祐教授、インドネシア ディポネゴロ大学のMochammad Ariyanto助教授(兼・大阪大学大学院工学研究科 招へい教員)らの国際共同研究グループは、昆虫の生体内から得られる信号をAIが読み取り制御に活かすという、昆虫とAIが協働する新しいコンセプト「Insect Synergy Circuit(ISC)」(図1A)を提案し、その実証実験を行いました。
従来の昆虫サイボーグ研究では、「歩行」や「停止」といった外部から観察可能な行動のみを情報源として利用し、制御を行っていました(図1B)。しかし、この手法では、昆虫が周囲の環境に対して示す生理的反応を制御へ反映させることが困難でした。
今回、研究グループは、昆虫サイボーグ用装着型バックパックを開発し、「心拍」「神経信号」「体の動き」を同時に計測できるシステムを構築しました。さらに、AIを用いて、生体内信号から昆虫が置かれている環境を推定するモデルを構築しました。このモデルを用いて、昆虫が落ち着いた状態にあると判定された場合にのみ低負荷の刺激を与え、不快環境下にあると判定された場合には刺激を与えない閉ループ制御を実現しました。今後、生体とAIが協働する次世代サイボーグ技術への展開が期待されます。
本研究成果は、学術誌「ROBOMECH Journal」に、5月12日(火)に公開されました。
図1. (A)本研究で提案するISCアーキテクチャ。(B)従来方式。
研究の背景
世界各国の研究グループは、20年以上にわたり昆虫サイボーグの研究を進めてきました。これまでに、さまざまな種類の昆虫と小型電子機器を組み合わせることで、においの発生源探索や、指定経路の歩行などを実現しています。しかし、従来の制御は、外部から観察可能な行動に基づいて行われてきました。そこで私たちは、昆虫が周囲の環境に反応して示す生理的応答も制御に取り入れる、すなわち「昆虫の声を聴き、それに応じて制御する」という新たな視点を昆虫サイボーグ研究に導入することを目指しました。
研究の内容
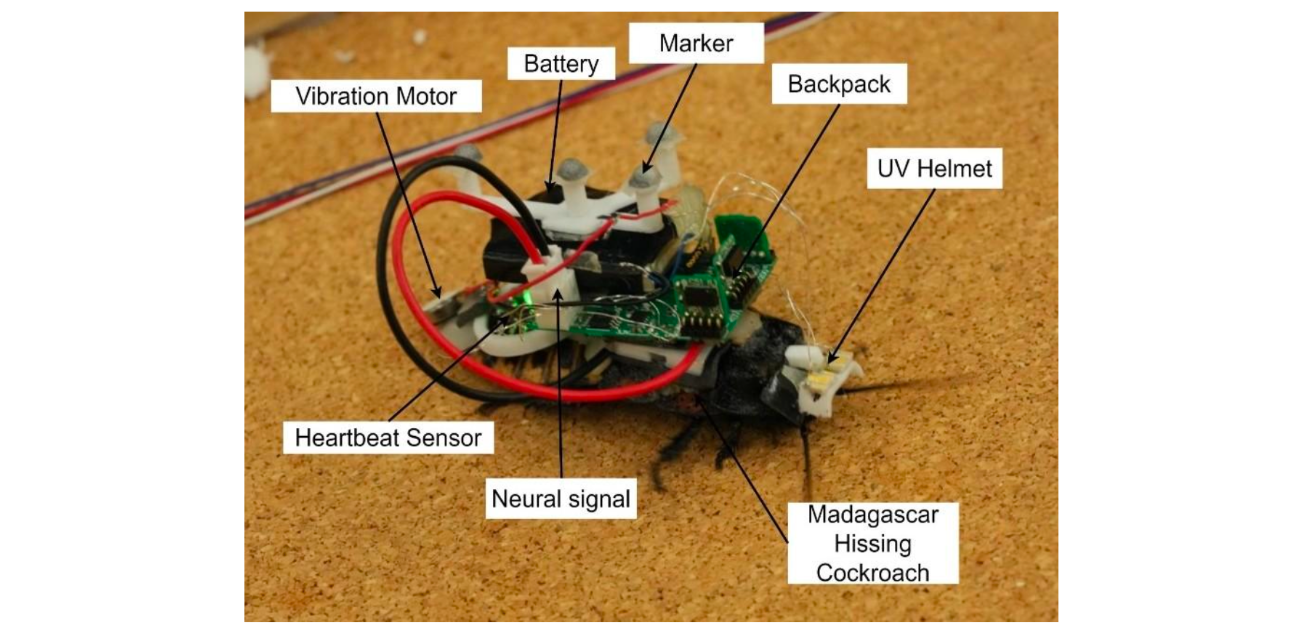
昆虫とAIが協働することを目的としたInsect Synergy Circuit(ISC)という新しいコンセプトの実現可能性を検証するために、「心拍」「神経信号」「体の動き」の同時計測、低負荷の刺激入力、および負担が大きい手術を必要としない着脱が可能なバックパックを開発しました(図2)。このバックパックを装着した昆虫サイボーグを、自然な状態、UV暴露、化学物質暴露、高温、餌が存在するという5種類の異なる環境下に配置し、AIに学習させた結果、生体内部情報から現在置かれている環境を93%の精度で識別することができました(図3A)。また、より実環境に近い条件下でも運用可能な分類精度を維持することができました。
さらに、複数環境を備えた装置において踏破実験を行いました。未サイボーグ群は餌のある部屋に留まり出口に到達できなかったのに対し、サイボーグ化群では、昆虫が落ち着いているとAIが判断した場合にのみ刺激を与える閉ループ制御が機能し、複数の個体が脱出することに成功しました(図3B、図3C)。
図2. バックパックを取り付けた昆虫サイボーグ
図3. (A)学習したランダムフォレスト分類器の混同行列。 全体的に高い分類精度が示された。(B)未サイボーグ群の軌跡。餌のある部屋にとどまる傾向がある。 (C) サイボーグ化群の軌跡。装置から脱出できる個体が複数現れる。
本研究成果が社会に与える影響(本研究成果の意義)
本研究は、昆虫サイボーグを「外部から操作する対象」ではなく、「共に働くパートナー」として捉える新しい概念を提案するものです。短期的には、倒壊した建物内での生存者探索の生体センサー、害虫の早期検知、環境モニタリングなど、小型ロボットでは対応が困難な領域での応用が期待されます。長期的には、昆虫が動物・植物・人間をつなぐ自然な媒介者となり、AIが昆虫を介して生態系全体を把握することで、種間の相互理解やコミュニケーションを支援し、多様な生物が共存する生態系の構築に寄与する可能性が示唆されます(図4)。加えて、ISCの枠組みは昆虫に限らず他の生物や各種センサーシステムにも応用可能であり、生体とAIが協調する次世代サイボーグ技術への発展が期待されます。
図4. 長期的なビジョンのイメージ
特記事項
本研究成果は、2026年5月12日(火)学術誌「ROBOMECH Journal」に掲載されました。
タイトル:“Perception-driven control strategy for bio-intelligent cyborg insect”
著者名:Chowdhury Mohammad Masum Refat, Mochammad Ariyanto, Kotaro Yamamoto, Ryo Tanaka, Keisuke Morishima
DOI:https://doi.org/10.1186/s40648-026-00344-7
なお、本研究は、科学技術振興機構(JST)ムーンショット型研究開発事業(課題番号:JPMJMS223A)、および日本学術振興会(JSPS)科研費(課題番号:22H04951)の支援を受けて行われました。また、第一著者は、「三菱商事国際奨学金」(MITSU2317)の支援を受けています。
参考URL
SDGsの目標


用語説明
- Insect Synergy Circuit(ISC)
昆虫の内部状態からの推定に基づき、それに応じて刺激を制御する閉ループ型バイオハイブリッドシステムを構築することで、昆虫とAIのより自然で協調的な相互作用を実現すること。従来の行動ベース制御から内部状態ベース制御への転換が特徴である。