
製造現場でのロボットの自律的な作業を実現するAI技術を開発
複雑形状の部品の供給・組み立て工程へのロボット導入促進に期待
発表のポイント
・NEDOと産業技術総合研究所、大阪大学、中部大学は、製造現場におけるロボットの自律的な部品供給・組立作業を実現する人工知能(AI)技術を開発しました。
・本技術は、物の形状データや人による作業実演データをもとに、ロボットによる部品供給と組み立て作業の事前行動計画、視覚情報に基づく作業中の高速な行動計画を策定できます。これにより、従来は困難であった多品種少量生産で複雑な形状の部品を必要とする組み立て工程へのロボットの導入が進み、製造業の生産性向上が期待できます。
・本技術で作成した行動計画策定ソフトウエアを、特設ウェブサイト上 ( https://nedo-robot-ai.jimdofree.com) で公開を開始しました。
・今後は、本技術の性能向上や連動性を高めるための研究開発を続けるとともに、実用化に向けた企業との共同研究も推進していきます。
概要
近年の消費者ニーズの多様化に伴う生産工程の複雑化(多品種少量生産、特注品生産など)により、ロボットも複雑な作業に対応することが求められています。従来のロボットは、溶接、搬送など、単一の工程を担うことが主流でしたが、現在は、ロボットが部品供給から製品組み立て作業までの全工程を一手に担う場合も多くなっています。一方で、部品供給や製品組み立て作業のロボット化では、ロボット動作の事前設計膨大な時間や手間を要するため、その効率化が求められています。また、ロボット導入後も、ロボットの視覚情報に基づく作業計画の策定に要する時間の短縮も課題でした。
そこで、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)と国立研究開発法人産業技術総合研究所、国立大学法人大阪大学、学校法人中部大学は、製造現場向けロボットへの作業の教示から運用までの課題を解決するための技術開発 に取り組んでいます。そして今般、製造現場におけるロボットの自律的な部品供給・組み立て作業を実現する人工知能(AI)技術を開発しました。
本技術は、物の形状データや人による作業実演データをもとに、ロボットによる部品供給作業および組み立て作業の事前行動計画、視覚情報に基づく作業中の高速な行動計画を策定できます。これにより、従来は困難であった多品種少量生産で複雑な形状の部品を必要とする組み立て工程へのロボットの導入が進み、製造業の生産性向上が期待できます。
また8月29日より、本技術で作成した行動計画策定ソフトウエアを、特設ウェブサイト( https://nedo-robot-ai.jimdofree.com)上で公開を開始しました。
今後は、本技術の性能向上や連動性を高めるための研究開発を続けるとともに、実用化に向けた企業との共同研究も推進していきます。
なお、9月3日から開催される「第37回日本ロボット学会学術講演会」において、今回開発した技術を用いたロボットのデモを実施しました。
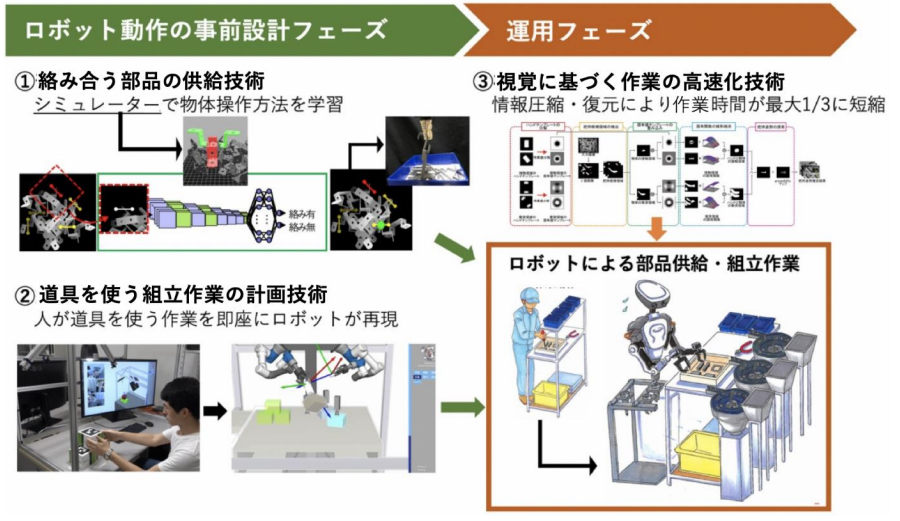
図1 今回開発したAI技術の全体像
今回の成果
今回開発した具体的な技術などは以下の4つです。
【1】絡み合う部品の供給技術:実機を使わずにシミュレーションだけで困難な作業を学習
ロボットがトライ・アンド・エラーを繰り返すことで、難しい作業を学習することは、ロボットにとって有効な作業計画方法です。しかし、ロボット実機による大量の作業実行が必要なので、生産現場での実用は困難でした。
今回、作業の難しさに応じて、人が事前に注目した情報を、人が設計した手順に従って理解・認識する従来型の特徴量に基づいた手法と、シミュレーションによる深層学習の手法を使い分けて、実機を使わない物体操作の学習を実現しました。これにより、シミュレーター上でバラ積み状態の物体が絡むか、絡まないかを再現し、シミュレーター上で学習させて、絡む可能性のある部品を避けてロボットが部品を取り出すことが可能となりました。取り出しの成功率は、従来の実機による学習事例と同等の90%程度でした。人がロボットから目を離さずに1~2日かけて学習させる困難な教示作業を、1部品につき5時間程度のシミュレーションを動作させるだけ(その間人手は不要)で学習させることができ、部品供給のための事前行動計画の作業時間や人の手間を削減できます。
図2 シミュレーションによる難物体のピッキング方法の学習
【2】道具を使う組み立て作業の計画技術:見まねによる即時教示・道具操作
ロボットに複雑な組み立て作業を教えるには、プログラムの専門家が、膨大な労力と時間をかける必要があります。今回、人がカメラの前で組み立て作業を実演し、ロボットがその場ですぐに見まね(模倣)する手法を開発しました。教示のために必要であったロボットに対する高い専門知識を必要としないため、組み立て作業を行う製造現場の作業者が、普段の手作業を実演するだけで、ロボットが自律的にその作業を模倣します。具体的には、従来は、人が1~2日かけて教示していたドライバーを使ったネジ締め作業など、道具を使った細かな組み立て作業を、数分の実演をすれば、ロボットが学習し、すぐにその場でロボットが作業を実行できるため、組み立て作業の事前行動計画に要する作業時間やプログラム作業の削減が可能です。
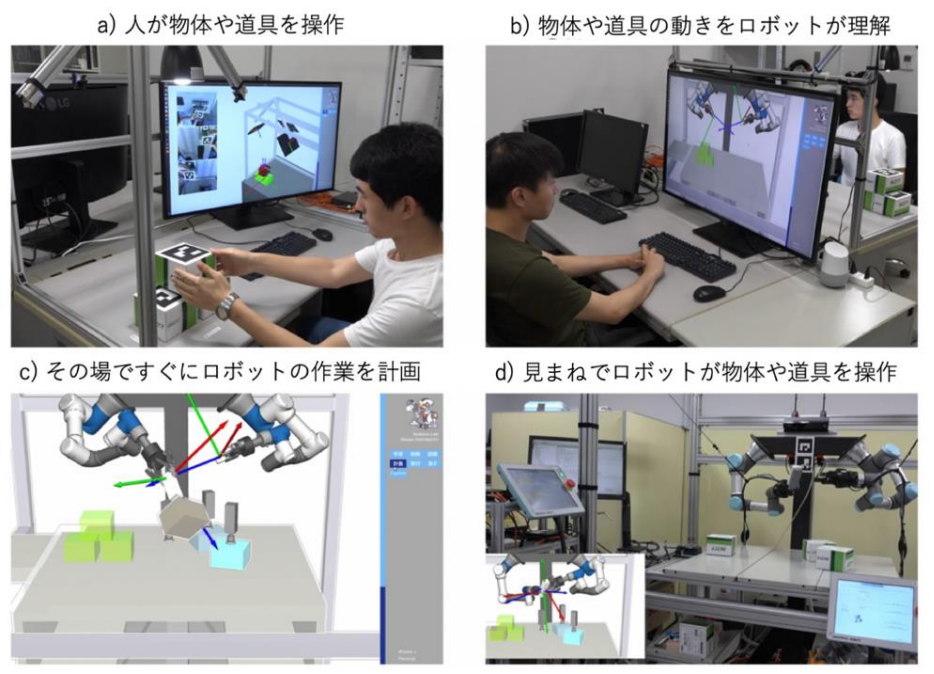
図3 人による手作業をロボットが即座に見まね
【3】視覚に基づく作業の高速化技術:物体操作のための視覚情報を効率的に圧縮・復元
ロボットが物体をつかむ際には、ロボットの視覚機能で得た画像から物体をつかむ位置を計算する必要があります。この計算時間は作業中の待ち時間に直結するため、速度をいかに速められるかが重要となります。
今回、視覚機能を持つロボットハンドからの画像データの行列分解に基づく効率的な圧縮・復元処理を開発し、把持位置検出のための計算時間の削減を実現しました。市販の一般的な把持位置検出処理に適用することで、同手法に要する計算時間を最大1/3まで短縮できました。これにより、ロボット作業の高速化が期待できます。
【4】開発成果の一般公開
産業用ロボットの導入を容易にするためのソフトウエア・データベースを、特設ウェブサイト( https://nedo-robot-ai.jimdofree.com )上で8月29日より一般公開しました。
本発表に関係する公開成果である、①部品供給のための部品バラ積みシミュレーター、②物体とロボットのモデルから組み立て作業を自動で計画するソフトウエア、③視覚情報から高速に物体の把持位置を検出するソフトウエアを含んでいます。一般公開を通じて、産業用ロボットの導入に興味を持つ企業、研究機関に公開内容を広く知ってもらうことで、組み立て現場での試用や研究開発用途への応用など、今後の共同研究開発につながることを期待しています。
今後の予定
今後は、各機関において今回開発した技術の性能向上や連動性を高めるための研究開発を継続するほか、実用化に向けた企業との共同研究も推進します。さらに、従来型のロボット自動化だけでなく、人・機械協調型生産に対しても、各技術やシステムの実証を進めていく予定です。
注釈の説明
参考URL
大阪大学 大学院基礎工学研究科HP
https://www.es.osaka-u.ac.jp/ja/