
Exploring the eating experience of a pneumatically-driven edible robot: Perception, taste, and texture
In a landmark study, Associate Professor Yoshihiro Nakata of the University of Electro-Communications, Japan, in collaboration with researchers from Osaka University, conducted groundbreaking research on edible robotics. Published in PLOS ONE, this study is the first to explore the experience of consuming a moving edible robot.
Drawing inspiration from traditional Japanese culinary practices like Odorigui, which involves eating live seafood, this research extends these cultural concepts into the domain of robotics. The team developed a pneumatically-driven robot made of gelatin and sugar, focusing on creating an experience that merges the animate with the edible, reminiscent of the dynamism found in Odorigui.
The study comprised two experiments. The first experiment assessed participants' impressions based solely on observing the robot's movements, without eating. This phase provided valuable insights into how the perceived animateness of the robot impacts the hypothetical eating experience.
In the second experiment, each participant experienced both conditions: eating the robot while it was in motion and when it was stationary. This within-subject comparison revealed that perception (Intelligence, emotion, animateness, guilt, and freshness) was notably more intense when the robot was in motion. The texture experienced while biting and chewing the animated robot was different from the stationary condition.
In pioneering the field of Human-Edible Robot Interaction (HERI), which is a novel concept of studying interactions between humans and edible robots, this study represents a significant stride in understanding how people interact with and perceive edible, moving robots. By creating a controlled environment to examine human psychology in the context of consuming these robots, the research offers novel insights into the immediate psychological and cognitive effects of such interactions.
Furthermore, the exploration of HERI extends beyond psychological and cognitive responses. It delves into ethical, societal, and philosophical considerations of consuming edible robots and the act of eating, thereby broadening our understanding of the complex interplay between technology, food ethics, and human values. In addition, this pioneering research opens new possibilities in the intersection of culinary arts and robotics, suggesting innovative applications in gastronomy and medical fields.
For a more immersive understanding of our study and to see the edible robot in action, please visit [https://youtu.be/OoAszrv5vy4] to watch our research video. This visual presentation offers a unique perspective on the experiments and the innovative concept of Human-Edible Robot Interaction (HERI).
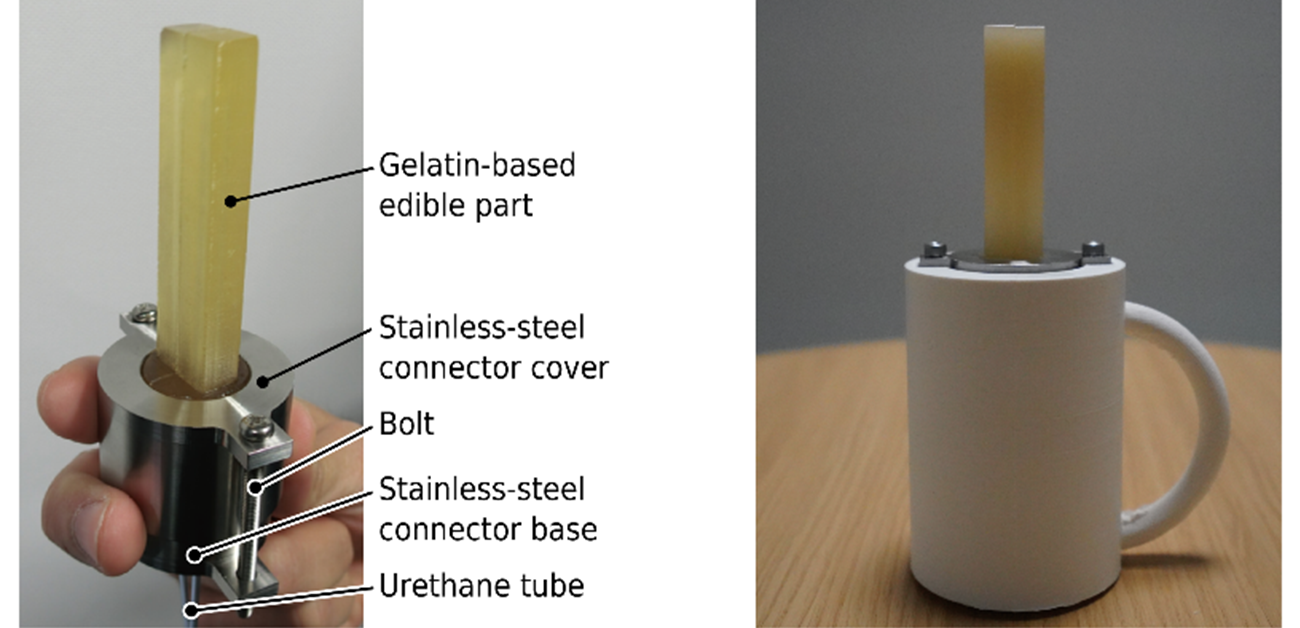
Fig.
Edible robot: (a) three-dimensional computer-aided design model, (b) internal structure, (c) photograph of the edible robot, (d) the edible robot with a three-dimensional printed handle.
Credit: 2024 Yoshihiko Nakata et al., Exploring the eating experience of a pneumatically-driven edible robot: Perception, taste, and texture, PLOS ONE
The article, “Exploring the eating experience of a pneumatically-driven edible robot: Perception, taste, and texture,” was published in PLOS ONE at DOI: https://doi.org/10.1371/journal.pone.0296697
Related Links
Human-Edible Robot Interaction (YouTube)