
軌跡だけから動物行動の特徴を理解する人工知能技術を開発
ハイブリッド技術による効率的な状態推定と特徴抽出
研究成果のポイント
・動物の移動軌跡だけから、行動状態を推定し、その特徴を網羅的に比較抽出する解析手法STEFTRを開発。
・この技術は、2種類の人工知能技術(教師なし学習と教師あり学習)のハイブリッドにより実現。
・線虫やペンギンの行動状態を、時間尺度(分〜日)や空間尺度(mm〜km)に関わらず正しく推定。
・2条件の比較により、行動状態の特徴が経験や遺伝子変異によってどう変化するかも解明。行動特徴の違いに関連する神経活動変化も発見。
・本手法により、さまざまな動物の移動行動を解析し、移動行動に伴う様々な「なぜ」を理解することが容易になった。
本研究成果の要旨
小型で安価なGPS装置やビデオカメラなどによって人や動物の行動の記録は極めて簡単になりました。しかし、それらの行動記録から「なぜそのように行動したのか?」を推測することは困難です。
今回、名古屋市立大学と大阪大学などの共同研究チームとして、山崎修平特任研究員(大阪大および名市大)、前川卓也准教授(大阪大)、木村幸太郎教授(名市大および大阪大)らは、動物行動の特徴を理解するためのハイブリッド型人工知能技術STEFTR(ステフター)法を開発しました。この手法により、シャーレの中を10分で1cm程度だけ移動する線虫も、南極海を1日以上掛けて数キロメートル移動するペンギンも、全く同様に解析してそれぞれの行動状態を90%以上の確率で正しく推定することに成功しました。さらに、実験室内の線虫、ショウジョウバエ、コウモリなどから、学習やフェロモンの経験によって引き起こされた行動の変化を発見し、線虫からは行動変化に関連する神経活動変化も発見しました。
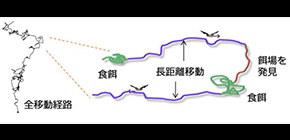
この研究成果により、野外動物の移動データから巣や餌場のような「重要な場所」がより容易に推測できること、また実験室内での動物の行動データから重要な脳活動が発見されることなどが期待できます。
本研究の成果は、日本時間2019年6月28日(金曜日)に、英文生命科学雑誌「Frontiers in Neuroscience」においてオンライン公開されました。
研究の背景
私たちの行動は、スマホ/スマートウォッチのGPS装置や街角のカメラによって簡単かつ大量に記録されるようになってきました。同様に、動物(鳥や昆虫も含みます)の行動もGPS装置やカメラによって簡単かつ大量に記録され、実験室内においては動物の脳機能を理解するために、また野外では動物の生態を理解するために利用されようとしています。
しかし、実際にはいくら動物の行動が記録されていたとしても、動物が「なぜ」そのように行動したかは分かりません。ビデオ画像が存在していれば、「寝ている」「餌を食べている」などは分かりますが、「目的地に向かっているのか?」「あてもなくさまよっているのか?」などは分かりません。もし「なぜ動物がそのように行動したのか?」が分かれば、生物資源の持続的有効利用・外来種の拡散防止・害獣の移動制御など、社会問題の解決につながる可能性があります。またそのような行動を引き起こす神経活動を特定することは、脳科学の大きな発展につながります。
行動のデータからその時の動物の状態(休息/食餌/移動、など)を推定する手法 (図1) はこれまでにも存在していましたが、その多くは特定の動物行動に関する詳細なビデオ画像または詳しい知識を必要としているため、現在のように「様々な動物行動のデータが大量に存在する」というビッグデータ時代に対応できていません。また、人工知能(特に「深層学習」)技術を用いて大量データを自動的に判別する手法も存在しますが、数百万といった極端に大規模なデータが必要であり、このような大規模データの取得は多くの動物行動解析では困難なため、この手法の利用は限られています。
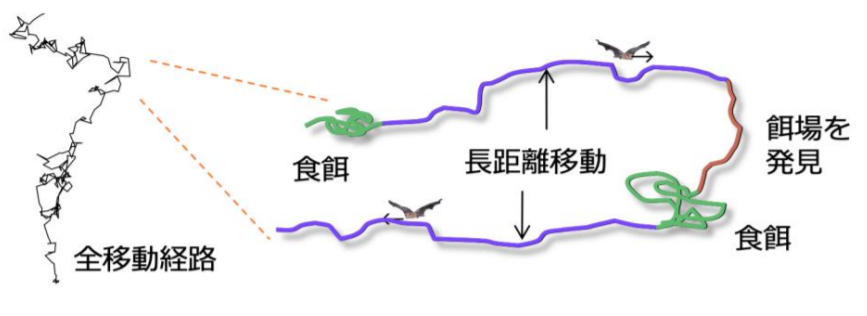
図1 動物行動のデータからの行動状態の推定。
研究の成果
今回共同研究チームは、比較的少数(数十匹程度)の動物個体のデータであっても、位置移動の情報だけから動物の行動状態を効率的に推定し、さらにそれぞれの状態について行動変化の特徴の違いを詳しく調べる手法を開発しました。まず、行動状態の推定に関しては、移動行動の速度や進行方向に関する8つの側面に関して値の分布を計算し、その分布が幾つの山に分かれるかを人工知能技術の1つ(期待値最大化法による混合正規分布の分離)で調べました (図2上) 。分かり易く言えば、「休んでいる状態、餌を食べている状態、長距離を移動している状態では、それぞれの状態で平均的な移動速度や進行方向の変化が異なる」という考えに基づいています。この解析によって最もきれいに分かれた複数の「山」は、それぞれの行動状態に対応しています。この方法は、事前の知識無しでさまざまな動物の行動に対応できることを目標としたため、実験室内で寒天培地の表面をミリメートル単位で移動する線虫も、南極大陸近くの氷上や海を10キロメートル程度移動するペンギンも、全く同じように解析することができます。この手法による解析結果を、専門家による行動状態の判別結果と比較した所、90%以上の正確性がありました。この結果は、個別の動物行動に特化した従来の手法より優れており、他の人工知能技術による行動状態推定にほぼ匹敵しました。
さらに、共同研究チームはそれぞれの行動状態にどのような特徴があるのかを、決定木分析とよばれる人工知能技術で用いる値(情報利得)を指標にして詳しく調べました (図2下) 。特に、実験室内での研究対象である線虫・ショウジョウバエ・コウモリの行動に関して調べたところ、学習やフェロモンの経験によって特定の行動状態の特徴がどう変化するかを詳しく明らかにすることができました。特に線虫に関しては、行動特徴変化の原因と考えられる神経活動の変化を、ロボット顕微鏡を用いて発見することができました。さらに、神経機能に関与する複数の遺伝子の突然変異体に関して、それぞれの変異体の行動の特徴を自動的に効率良く明らかにすることができました。
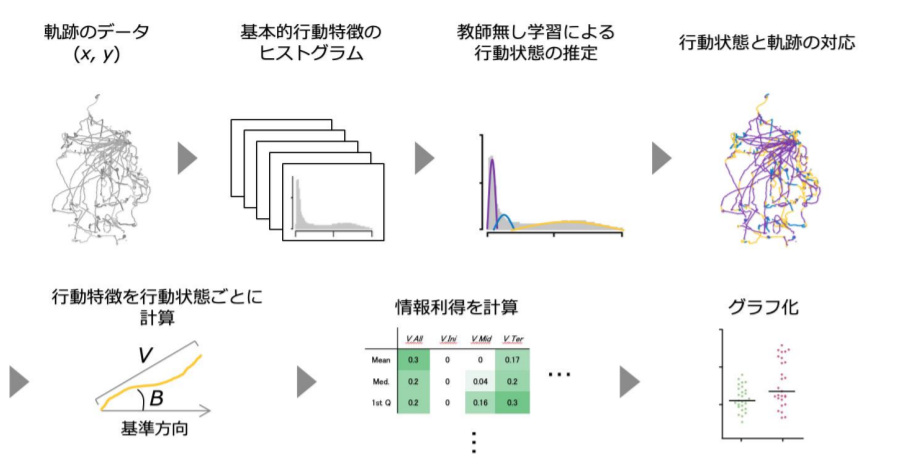
図2 行動状態の推定(上)と行動状態からの特徴抽出(下)。
研究成果の意義
これまでは「行動状態の推測」にはその動物行動に対する充分な事前の知識や極端に大規模なデータが必要でしたが、今回の研究手法によって、事前の知識や大規模データ無しでも「行動状態の推測」および「行動状態からの特徴の抽出」が可能になりました。これにより、野外動物の行動データからは巣や餌場、さらには人がこれまで認識していなかった「重要な場所」がより効率的に推測できるようになるはずです。また、実験室内で脳科学研究に利用されている動物の場合は、それぞれの行動状態に特徴的な脳活動や、行動状態の変化のきっかけになるような刺激の発見につながるでしょう。すなわち、本研究手法は、近年飛躍的に取得が容易になった動物行動のデータから「なぜ動物はそのように行動したのか?」を理解することを大きく助けることができます。さらに本手法は、動物だけに限らず、高齢者や幼児の行動予測(「見守り」)などにも応用できる可能性があります。
特記事項
研究成果は、英文科学雑誌「Frontiers in Neuroscience(フロンティアーズ イン ニューロサイエンス)」2019年6月28日(20:00)オンライン公開されました。
論文タイトル
STEFTR:A hybrid versatile method for state estimation and feature extraction from the trajectory of animal behavior
(STEFTR:動物軌跡から行動の状態推定と特徴抽出を行うためのハイブリッド万能手法)
著者と所属
山崎修平、尾原和也、伊藤健太郎、國分亙彦、北西卓磨、高市大輔、山田恭史、池尻洋輔、平松文惠、藤田幸輔、谷本悠生、山添-梅本萌子、橋本浩一、佐藤克文、依田憲、高橋晃周、石川由希、上川内あづさ、飛龍志津子、前川卓也、木村幸太郎
山崎修平:大阪大学大学院理学研究科生物科学専攻および名古屋市立大学大学院システム自然科学研究科大学院生(当時)
尾原和也:大阪大学大学院情報科学研究科マルチメディア工学専攻大学院生(当時)
伊藤健太郎:総合研究大学院大学複合科学研究科極域科学専攻および国立極地研究所大学院生、第58次南極地域観測隊参加
國分亙彦:総合研究大学院大学複合科学研究科極域科学専攻および国立極地研究所助教、第58次南極地域観測隊参加
北西卓磨:大阪市立大学大学院医学研究科准教授
高市大輔:名古屋大学大学院理学研究科大学院生
山田恭史:同志社大学研究開発推進機構特任任用助手(当時)
池尻洋輔:大阪大学大学院理学研究科生物科学専攻および名古屋市立大学大学院システム自然科学研究科大学院生
平松文惠:大阪大学理学部生物科学科学生(当時)
藤田幸輔:大阪大学大学院理学研究科生物科学専攻特任研究員(当時)
谷本悠生:大阪大学大学院理学研究科生物科学専攻大学院生(当時)
山添-梅本萌子:大阪大学大学院理学研究科生物科学専攻大学院生(当時)
橋本浩一:東北大学大学院情報科学研究科教授
佐藤克文:東京大学大気海洋研究所教授
依田憲:名古屋大学大学院環境学研究科教授
高橋晃周:総合研究大学院大学複合科学研究科極域科学専攻および国立極地研究所准教授
石川由希:名古屋大学大学院理学研究科講師
上川内あづさ:名古屋大学大学院理学研究科教授
飛龍志津子:同志社大学生命医科学部 教授
前川卓也:大阪大学大学院情報科学研究科准教授
木村幸太郎:名古屋市立大学大学院システム自然科学研究科教授および大阪大学大学院理学研究科招へい教授
(「(当時)」は、研究実施当時に所属した研究機関とその時の身分)
掲載学術誌
英文科学雑誌「Frontiers in Neuroscience(フロンティア—ズ イン ニューロサイエンス)」
URL: https://doi.org/10.3389/fnins.2019.00626
研究助成
本研究の主要な部分は、文部科学省新学術領域研究「生物移動情報学」に参加する神経科学・生態学・ロボット工学・データ科学分野の研究者の融合領域研究の成果です(JP16H01769、JP16H06536、JP16H06539、JP16H06541、JP16H06542、JP16H06545、JP17H05983)。またその他にも文部科学省科研費(24681006、24681006、25249020、16H04655、16K16185、17K19450、18H05069)、同省博士課程教育リーディングプログラム「生体統御ネットワーク医学教育プログラム」、大阪大学「知の共創」プログラムなどの支援を受けました。
参考URL
大阪大学大学院理学研究科 生物科学専攻
http://www.bio.sci.osaka-u.ac.jp/~kokimura/j/Top.html