
触覚センサの自在な設計を可能に
導電材料を圧力分布センサに変える新技術
研究成果のポイント
・一般的な導電材料を用いて物体の接触による圧力分布を計測する汎用な触覚センサを開発
・これまでは感圧材料が必要で設計の自由度に課題があったが、本研究では電気を通す材料に電極を取り付けるだけで圧力分布センサに変えるメカトロニクス技術、アルゴリズムを開発することで形状と機能の自在な設計を可能に
・感度や範囲の調整も容易で、高精度な圧力推定により、多様なロボットの安全かつ高度な制御への応用に期待
概要
大阪大学大学院基礎工学研究科の吉元俊輔助教らの研究グループは、一般的な導電材料を用いた圧力分布の計測技術を新たに開発しました。これにより特殊な感圧素材を用いることなく、触覚センサ の自在な形状と機能の設計が可能になり、多様なロボットの安全かつ高度な制御への応用が期待されます。
人とロボットが共存する現代の社会において安全設計は重要な課題です。特に、ロボットのどの部位にどれだけの力が加わっているかという触覚センシング(圧力分布の計測)を備えて力加減を操ることで、過剰な接触による危険を排除するとともに、人や物、環境に優しい動作や、親しみのある身体コミュニケーションを実現することが可能になります。このような触覚機能を多様なロボットに与えるためには、柔軟で形状への適応性が高く、製造が容易で安価な触覚センサが必要です。従来は緻密なセンサ配列や特殊な感圧材料 などを用いた方法が主流でしたが、設計の自由度が低く製造が難しいことから、ロボットの触覚機能は限定的でした。
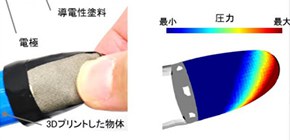
吉元助教らの研究では、二つの導電体が接触する際の電気接触抵抗が接触圧力によって変化することに着目し、接触圧力の分布を高精度に推定するトモグラフィ 技術を独自に開発しました (図1) 。その結果、電気を通す材料であれば何でも電極を貼り付けるだけで圧力分布を計測する触覚センサに変えることができるようになりました。例えば、導電性塗料を用いることで世界最薄の触覚センサを作ることも、複雑な形状や柔軟な材料、大小様々な物体を用いた触覚センサを作ることも、3Dプリントした物や組み上げた機器に後からセンサを付け加えることもでき、触覚センサのディジタルファブリケーション が可能になります。本研究成果により、機械に危険を察知する触覚機能を付与したり、床の圧力から人の活動状態を認識したりなど、ロボットやインタラクション、IoTへの貢献が期待されます。
本研究成果はIEEE Transactions on Industrial Electronics の特集号Novel Emerging Sensing, Actuation andControl Techniques for Haptic Interaction and Teleoperation (2019年夏出版予定)に掲載されます。(オンライン速報版は2018年11月7日公開済み)
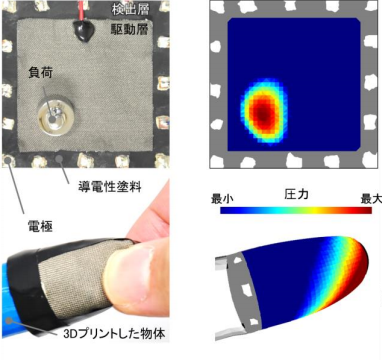
図1 一般的な導電材料を用いて圧力分布センサを作ることに成功
研究の背景
人とロボットが共存する現代の社会において、安全安心な機器設計が重要です。特に、ロボットのどの部位にどれだけの力が加わっているかという触覚センシング(圧力分布の計測)を備え、力加減を操ることで、過剰な接触による危険を排除するとともに、人や物、環境に優しい動作や、親しみのある身体コミュニケーションを実現することが可能になります。このような触覚機能をロボットに与えるためには、柔軟で形状への適用性が高く、製造が容易で安価な触覚センサが必要です。
従来、圧力分布の計測が可能な触覚センサを作るためには、緻密なセンサ配列を構成する必要があることや、特殊な感圧材料を用いる必要があることから、設計の自由度が低く製造が難しいという問題がありました。これに対し本研究では、電気を通す材料に電極を取り付けるだけで圧力分布センサを構成することに成功し、自在な形状の設計と安価で容易な製造を可能にしたほか、精度が高く感度や検出範囲の調整も容易な触覚センサの実装が可能になりました。さらに、3Dプリント技術と組み合わせることで触覚センサのディジタルファブリケーションが可能になり、多様なロボットの安全かつ高度な制御への応用に貢献が期待されます。
本研究成果の内容
図2 に示すように、二つの導電体が接触する際、その境界には電気接触抵抗が存在します。この電気接触抵抗は接触圧力に応じて変化します。したがって、二つの導電体うち一方にプラス極、もう一方に接地電極を接続して電圧を印加すると、接触部分の電圧は圧力に応じて変化します。また、接触圧力の分布に応じて導電体に印加される電圧の分布も決まります。この電圧の分布を推定することができれば、接触圧力の分布を計算することができます。

図2 計測原理:接触圧力と電気接触抵抗の関係
本研究では、一方の導電体の縁に配置した複数の電極から電圧を計測し、印加された電圧の分布を推定する、独自のトモグラフィ技術を考案しました。具体的には、 図3 に示すように、接地電極を接続する導電体の境界に複数の電極を配置し、接続状態を切り替えることで様々な電圧の印加状態に応じた電圧を取得します。取得した電圧の情報と導電体の電圧分布モデルを用いて逆問題 を解くことで接触部の電圧を推定し、接触圧力の計算に利用します。
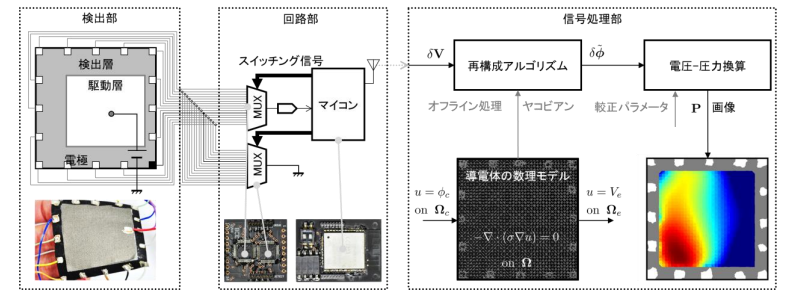
図3 計測システムの概要
考案したトモグラフィ技術は、これまでの物体内部の導電率分布をイメージングする電気インピーダンストモグラフィ(Electrical Impedance Tomography: EIT) とは異なり、二つの物体間の接触によって生じる電気接触抵抗の分布に基づいてイメージングします。そのため、感圧材料が不要であり、一般的な導電材料で検出部を構成することができるため、低価格であるだけでなく製造が容易です。例えば導電塗料の塗布と電極の貼付けにより様々な形の物体を圧力分布のセンサに変えることができます。また、高い汎用性を有しており、ミクロからマクロの対象まで同一の装置で扱うことが可能です。さらに、電圧増幅が不要なため高感度かつ高精度な計測が可能です。その上、接触時のみに電流が流れるため、従来よりも消費電力が少ないという特長もあります。実験では、接触位置を検出層の1辺の長さに対して5.68%、圧力を最大0.50N/mm 2 に対して5.38-10.2%の精度で推定できることを明らかにし、従来の圧力分布センサよりも優れた性能を達成できる可能性が示唆されました。
<参考:YouTube説明動画 https://youtu.be/e2boH-Peogs >
本研究成果が社会に与える影響(本研究成果の意義)
本研究成果は触覚センサの基本原理とその設計に関するものであり、以下のような様々な用途への応用が期待されます。
ロボット
ロボットの全身を覆うような触覚センサを実装し制御に用いることで、人や環境との過剰な接触を避ける安全対策を講じることができます。また、ロボットハンドの末端に触覚センサを取り付け、高度な物体操作が可能な制御システム構築に利用することもできます。さらに、接触により親しみのあるコミュニケーションが可能なロボットや、人が触れることで動作を指示可能な協調ロボットなどにも利用できます。
インターフェース
玩具や楽器などのボタン、計算機のキーボードなど、様々な入力インタフェースとして利用が期待されます。ディジタルファブリケーションにより、複雑な形状の機器や物体に触覚センサの機能を与え、環境に調和したインタフェースを構築したり新しいインタラクションを設計したりすることができるようになります。また、遠隔操作やバーチャルリアリティの触覚フィードバック において、刺激や動作の計測に利用することも可能です。
モニタリング
筋電義手などの義肢における触覚検出を可能にし、触覚フィードバックに利用することもできます。また、装具の装着状態をモニタリングし、機器の設計に活かすことも可能です。さらに、消費電力も少ないことから、日常モニタリングやInternet of Things (IoT)とも相性がよく、介護用ベッドの圧力検知と評価など、医療福祉における見守りシステムへの応用などが期待されます。
データ解析
人の触覚機能の解析、医療・スポーツにおける動作解析、製造物や素材の触感評価など、感覚や運動、対象物の性質に関する基礎解析への応用が期待されます。さらに、人工知能等の信号解析技術と組み合わせることで、画像では判別の難しい接触に関する認識システムを構築し、人の行動理解に役立てることも可能です。
研究者のコメント
触覚に関する計測は技術的な課題が多く発展途上で、視覚でいうカメラに相当する装置は存在していません。ヒトの触覚機能を凌駕する高度で汎用な触覚センサを安価に提供することを目標に、本研究に着手いたしました。本成果はその第一歩であり、今後も改善と多様な社会展開を目指してまいります。
特記事項
本研究成果はIEEE Transactions on Industrial Electronics における特集号Novel Emerging Sensing, Actuationand Control Techniques for Haptic Interaction and Teleoperation (2019年夏出版予定)に掲載されます。(オンライン速報版は2018年11月7日公開済み)
タイトル:Tomographic Approach for Universal Tactile Imaging with Electromechanically Coupled Conductors
著者名:Shunsuke Yoshimoto, Yoshihiro Kuroda, and Osamu Oshiro
本研究成果に関連し、下記の特許を出願しています。吉元俊輔,黒田嘉宏,大城理,触覚センサ.特願,2018-054266,2018/3/22.
本研究は、科学研究費補助金若手研究A(JP16H05875)の支援を得て行われました。
参考URL
大阪大学 大学院基礎工学研究科 機能創成専攻 生体工学領域 大城研究室
http://oshiro.bpe.es.osaka-u.ac.jp/index.html?outline_ja$menu_ja$
用語説明
- 触覚センサ
人の触覚機能を模したセンサのことで、接触の有無を検出する接触センサや、接触圧力を連続量として検出する圧覚センサ、滑りの変位を検出するすべり覚センサ、センサの近傍にある物体の位置や距離を検出する近接覚センサ、温熱覚センサ、硬さ覚センサなどが存在します。本研究ではこのうち圧覚センサを対象としています。
- 感圧材料
圧力によって電気抵抗が変化するような材料のことで、シリコンやゴムにカーボンや金属などの導電性粒子を混ぜて製造されています。
- トモグラフィ
物理エネルギーを与えた際の応答を計測し、逆問題を解くことで対象の形態や機能を可視化する技術です。電気、光、音など様々な物理エネルギーを利用した方法が考案されており、X線コンピュータ断層撮影(CT)や音響トモグラフィなどは物理探査、医療診断等で利用されています。
- ディジタルファブリケーション
ディジタルデータをもとに創造物を制作する技術のことです。計測装置やモデリングソフトを用いて形状データを作成し、プリンタや加工機などでデータを読み込んで材料を積層したり切削したりすることで自動造形します。
- 逆問題
出力から入力を求める問題や、入出力の関係性を求める問題を逆問題と呼びます。一般的に逆問題を解くには少数のパラメータから多数のパラメータを求める必要があり、最適化アルゴリズムなどを用いて近似解を計算します。提案手法では電極の電圧という出力から接触部位の電圧という入力を求める逆問題を扱います。
- 電気インピーダンストモグラフィ
電気を通す物体に複数の電極を配置し、電圧を印加する電極の組み合わせを変えながら電圧を測定し、導電率の分布を推定する方法です。主に生体組織のイメージングに利用されていますが、感圧材料に適用することで圧力分布をイメージングすることが可能になります。
- 触覚フィードバック
機械や電気など機器による刺激を身体に与えることで、接触によって生じる触覚を生成する技術です。振動や圧迫などの物理現象や神経活動などの生理的現象を再現することで所望の触覚を生じさせる様々な方法が考案されています。