

感覚運動学習での動作アシスト機器の効果をラット実験モデルで実証
神経科学的な知見を活かしたニューロリハビリテーション技術への応用に期待
本研究成果のポイント
・動作アシスト機器による運動機能補助効果を検証するためのラット学習実験モデルを開発
・誤答となる動作を引き起こした方が正しい動作を引き起こすより学習時間が短いことを観察
・動作アシスト機器を用いたリハビリテーション技術の神経科学的メカニズムの解明に期待
概要
国立研究開発法人産業技術総合研究所【理事長中鉢良治】(以下「産総研」という)人間情報研究部門【研究部門長 持丸正明】身体適応支援工学研究グループ 井野秀一 研究グループ長、金子秀和 主任研究員は、国立大学法人筑波大学システム情報系 長谷川泰久 准教授(当時。現:国立大学法人名古屋大学教授、筑波大学客員教授)、国立大学法人大阪大学大学院生命機能研究科 田村弘准教授らと、動作アシスト機器 の運動機能補助効果を検証するためのラット学習実験モデルを開発し、強制的に応答動作 を引き起こすことによって感覚運動の学習 過程に介入できることを実証した。
動作アシスト機器をリハビリテーションに活用することへの期待が高まっているが、障害の程度などを一定にすることが難しく、運動機能補助効果のメカニズムの検証は困難である。一方、これまでに、ラットもヒトと同様に、異なる刺激に対する正しい応答動作を学習できることが分かっていた。
今回、これまでに開発していたラット用学習実験装置にアクチュエーター を組み込んで強制的に応答動作を引き起こせるようにし、動作アシスト機器の効果を検証するための実験モデルを構築した。この実験モデルで健常なラットを用いて実験した結果、正答となる応答動作を引き起こすより、誤答となる応答動作を引き起こす介入の方が、正答となる応答動作を学習する時間が短いことがわかった。このモデルを脳梗塞片麻痺 ラットに適用して動作アシスト機器を用いたリハビリテーション過程の神経メカニズムを解明することにより、神経科学的な知見を活かしたニューロリハビリテーション(ニューロリハビリ) 技術ヘと高度化することへの貢献が期待される。なお、この研究の詳細は、平成29年1月12日に国際専門誌Learning & Behaviorのオンライン版に掲載された。
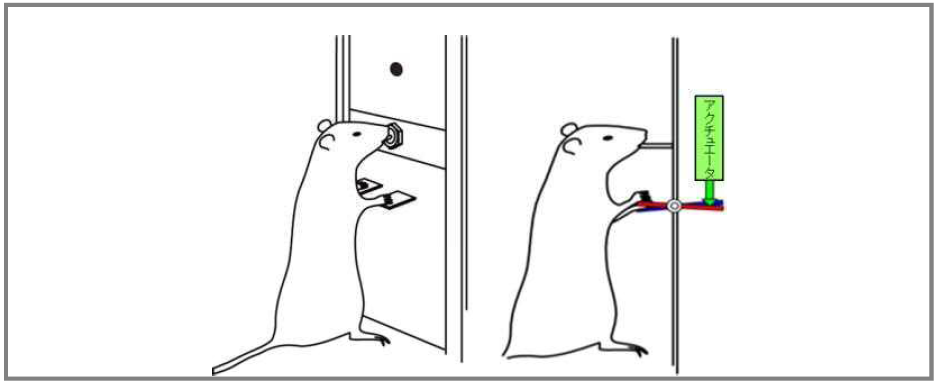
今回開発したラット用学習実験装置
アクチュエーターによって強制的に応答動作を引き起こす。
開発の社会的背景
近年、ロボット技術を応用した動作アシスト機器を用いるリハビリテーション(リハビリ)技術への期待が高まっている。しかし、ヒトでは障害の程度や訓練に対するモチベーションなどを一定にすることが困難であり、効果の検証は難しい。実験動物を用いれば、損傷部位を再現性よく作成することや、訓練法の効果だけを評価できる。しかし、ラットのような個体数を確保しやすい小動物を用いて動作アシスト機器の効果を評価できる動物実験モデルはこれまでになかった。
研究の経緯
産総研は、ニューロリハビリ技術の研究開発の一環としてロボティックリハビリテーション 技術の高度化を目指し、これまでに脳梗塞片麻痺ラットの身体機能の左右差を評価できる学習実験モデルを開発してきた。これにより、ラットでもヒトと同様の認知行動特性が観察できることを明らかにしている。また、動作アシスト機器の効果に関連する研究を行い、健常ラットと脳梗塞片麻痺ラットに正しい応答を選択させる課題では、応答しようとするタイミングで強制的に応答動作を引き起こすことで学習過程に介入でき、学習を促進可能であることを示唆するデータを得ている。
なお、今回の研究開発は、独立行政法人日本学術振興会(JSPS)「科学研究費助成事業JP22500495、JP26350648」およびグローバルCOEプログラム「サイバニクス: 人・機械・情報系の融合複合」の支援を受けて行った。
研究の内容
今回用いたラット用学習実験装置では、前面にある左右2本のレバーをラットが同時に押下げた状態になった後、ランダムに左右どちらか一方の前肢に空気を吹きかける(空圧刺激)。刺激に対して正答となる前肢を持ち上げてレバーから離せば報酬が得られ、逆の前肢をレバーから離すと誤答となり報酬が得られない。今回、刺激を受けた側の前肢を正答とする実験と、刺激を受けなかった側の前肢を正答とする実験とを行った。実験装置にはアクチュエーターが組み込まれ、前肢を強制的に持ち上げて応答動作を引き起こして学習に介入できる。この装置は、一種の動作アシスト機器と考えることができ、学習ヘの効果を調べることができると考えられる。また、アクチュエーターの駆動タイミングは任意に変更できるので、介入のタイミングを変えることもできる。
今回の学習実験では、空圧刺激を与えてから一定時間後に強制的に応答動作を引き起こす介入を混ぜてラットに学習させた。介入のタイミングや、介入する側の前肢(正答側と誤答側)を変えて、正答となる側の前肢を学習するのに要する日数などを調べた。尚、今回の実験では健常ラットを用いた。
これらの実験から、次のようなことがわかった。まず、介入自体や、そのタイミングなどによってエラー率の低下や反応時間の変化に差が生じたことから、強制的に応答動作を引き起こして学習に影響を及ばせることがわかった。また、 図1 に示すように、正答となる動作を引き起こす介入より、誤答となる動作を引き起こす介入の方が学習に要する期間が短くなる傾向が見られた。さらに、学習を開始して4、5日目のラットについて介入の効果をエラー率や反応時間によって比較した。ラットが自発的に応答しようとする時刻付近(空圧刺激から200ミリ秒から300ミリ秒後)に誤答側の前肢のアクチュエーターにより強制的に応答動作させた場合に、介入による学習の促進効果が高く、エラー率は低くなり、反応時間も短くなった (図2) 。
これらの結果は、「正しい動きを手取り足取り動かして教えることが学習に有効ではないか」という従来の仮説と異なるものであった。
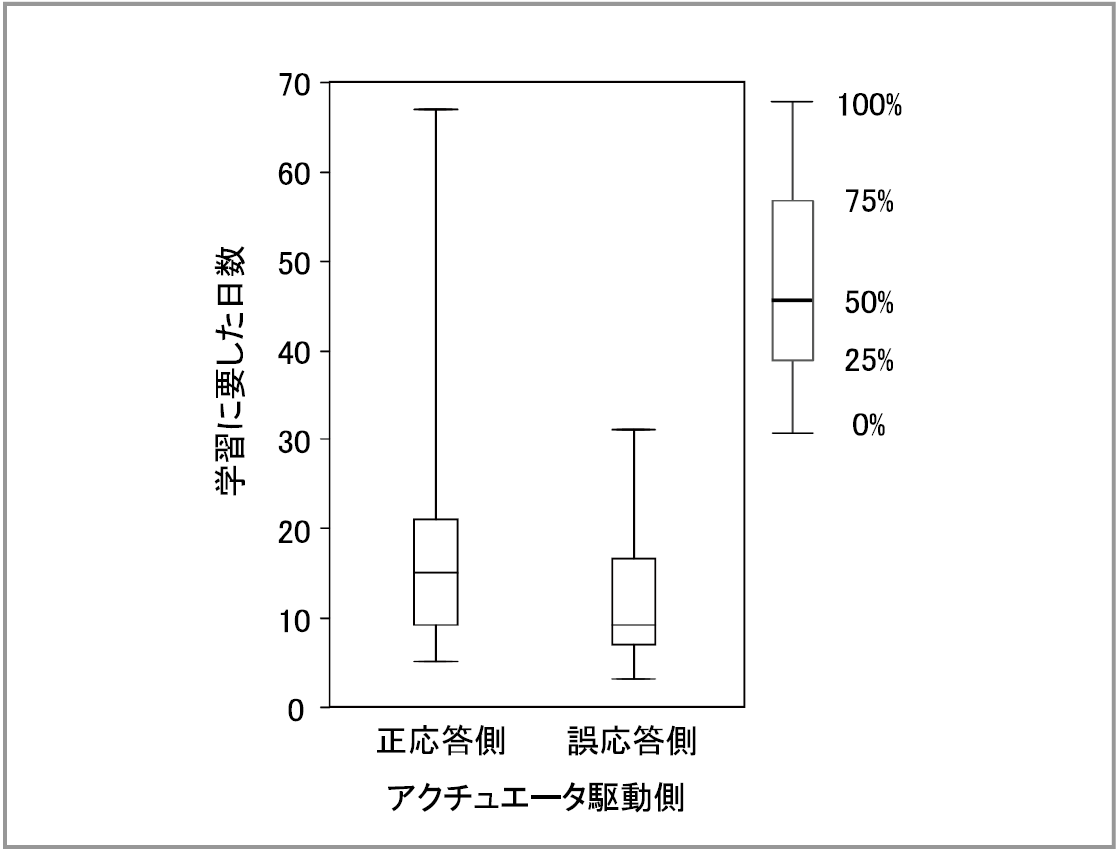
図1 強制的に引き起こす応答動作の違いが学習に要する日数に及ぼす影響
横軸に示した日数以内に学習できたラットの割合をパーセントで表示。
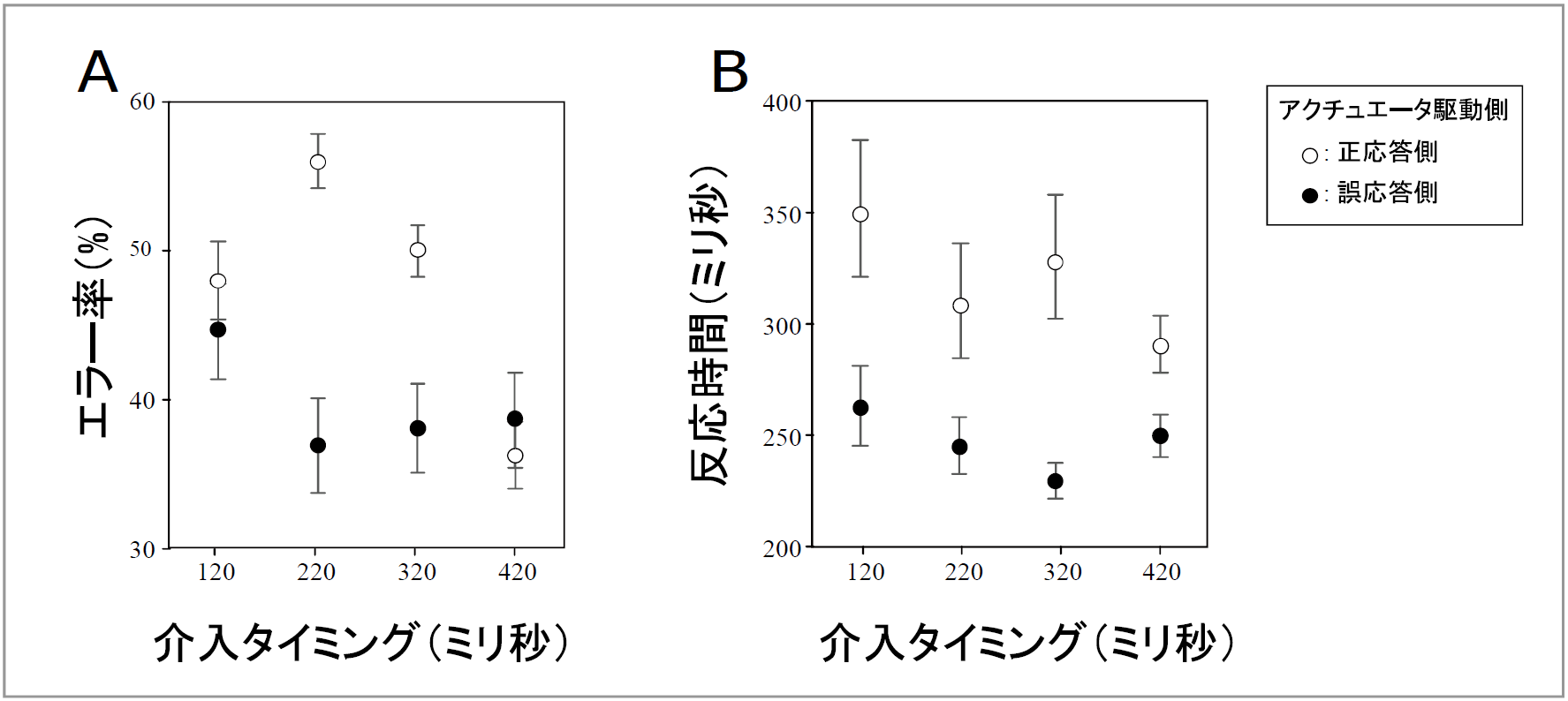
図2 介入タイミングの違いによるエラー率(A)と反応時間(B)の違い
正答となる側(刺激側か刺激の反対側)を交換して学習を開始した後4、5日日での結果。
今回の結果は、動作アシスト機器により反射経路を通じて神経細胞の活動性が高まったためと考えられる。 図3 に示すように、外見上、通常の応答動作 ( 図3 A) と同様にラットが動くのは、 図3 Bである。しかし、実験では強制的に誤答となる応答動作 ( 図3 C) の場合に学習が促進された。通常の応答動作Aと誤答となる強制的な応答動作Cでは、前肢がレバーを押す力の大小 ( 図3 の●と○) の位置関係が同じで、応答動作によって活動性が高まっていると考えられる脊髄運動神経 ( 図3 のα) が同じ筋肉に接続している。このように、誤答となる強制的な応答動作Cでは通常の応答動作Aと同様のレバー押力の感覚を生じ、反射経路を通じた脊髄運動神経の活動性の変化が、通常の応答動作の際の随意運動により生じる神経活動と似ている。そのため、誤答となる応答動作を引き起こした場合に学習が促進されたと考えられる。
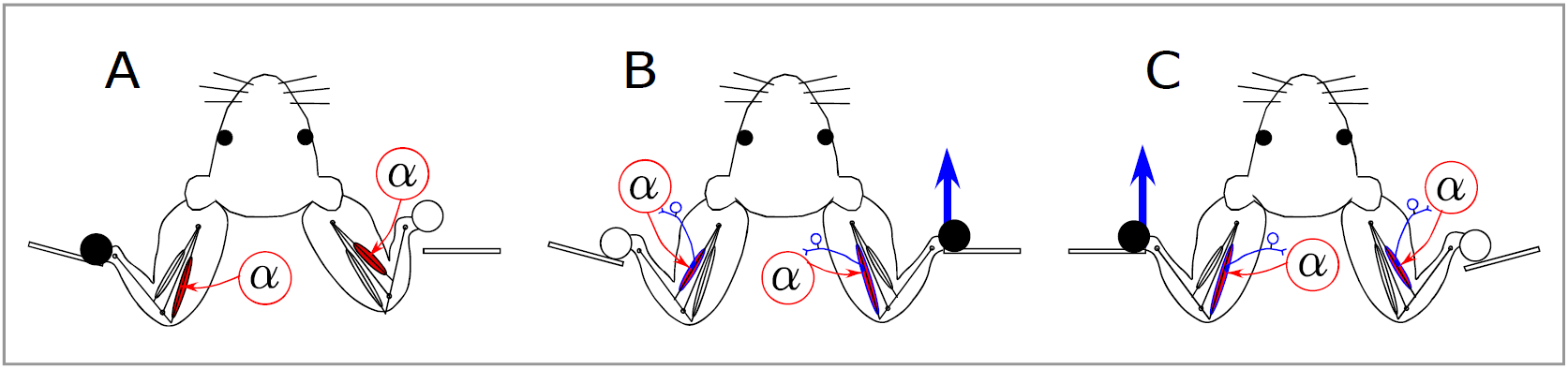
図3 通常の応答動作と強制的な応答動作で考えられるレパー押力の感覚と、反射経路を通じた脊髄運動神経の活動性の変化 (右前肢を持ち上げることが正しい応答動作である場合の例)
(A) 右前肢を上げてレバーを離した場合。(B) 右前肢が強制的に持ち上げられた場合。(C) 左前肢が強制的に持ち上げられた場合。レバーを押す力が強い方を前肢先端の「●」、弱い方を「○」で示した。また応答動作によって活動性の高まっていると考えられる脊髄運動神経を「α」で示した。青矢印はアクチュエーターによるレバーの動きを示す。
今回の結果から、外力によって望ましい身体の動きを引き起こすことが有効なのではなく、望ましい身体の動きを生じるような神経系の活動を引き起こすことが重要と考えられる。また、そのタイミングによっても効果が異なると考えられる。これらは神経科学的知見に基づくニューロリハビリテーション技術の今後の研究において有用と思われる。しかし、誤った動作を引き起こすという今回の介入方法をそのまま動作アシスト機器などに活用することはできないので、さらに研究を進める必要がある。
今後の予定
今後は、ラットの応答動作に伴う運動指令のタイミングを検出し、そのタイミングに同期して動作アシスト機器を駆動した場合の効果を検証する。また、脳損傷モデル動物でも同様にして学習に介入できるかどうかを検証する。さらに、神経系の活動を同時計測して学習促進効果のメカニズムを明らかにする。これらにより、神経科学的な知見を活かして、ロボット技術を応用したニューロリハビリテーション技術への貢献を目指す。
参考URL
大学院生命機能研究科 認知脳科学研究室
http://www2.bpe.es.osaka-u.ac.jp/
用語説明
- 動作アシスト機器
さまざまなアクチュエーターを利用して身体の動きを補助する装置。
- 応答動作
刺激に対して起こす動作。今回の実験モデルでは、刺激として空気を吹き付けたときに、左右いずれかの前肢を持ち上げる動作のこと。
- 感覚運動の学習
外界からの刺激によって生じる感覚に対して適切な運動によって応答することを覚えること。今回の実験モデルでは、刺激として左右どちらか一方の前肢に空気を吹き付けたときに、刺激された前肢、あるいは刺激されなかった前肢をレバーから離して応答することをラットは覚えなければならない。
- アクチュエーター
供給されたエネルギーを物理的運動に変換するもの。今回は電磁力によって駆動するアクチュエーターを使用した。
- 脳梗塞片麻痺
左右どちらか一方の脳部位が損傷すると、損傷部位に応じて左右のどちらかの半身に麻痺が生じる。そのような麻痺が脳血管の閉塞によって引き起こされたものをいう。麻痺の生じている側を麻痺側、逆を健側と呼ぶ。
- ニューロリハビリテーション(ニューロリハビリ)
脳や脊髄などの神経系の損傷による後遺症として身体機能や認知機能が低下する場合が多いが、神経科学的な知見を活かして効率良くこれらの機能を回復させようとするリハビリテーション。
- ロボティックリハビリテーション
ロボット技術を用いて患者の身体に外力を加えるなどしてリハビリ訓練の効果を得ようとするもの。
- 反射経路
筋肉や腱などの末梢器官への刺激がきっかけとなって比較的短時間に生じる身体応答を反射と呼ぶ。反射経路は、このような反射にかかわる神経活動の伝達経路のこと。骨格筋では、筋肉が外力によって引き伸ばされたとき、その筋肉が自ら収縮しようとする伸張反射がある。アクチュエーターを駆動させて前肢を急に持ち上げれば、引き伸ばされた筋肉を支配している脊髄運動神経の活動が増すことになる。