

遠隔操作性と繊細な作業性を備えた建設ロボットを開発
ImPACTタフ・ロボティクス・チャレンジによる新しい災害対応重作業ロボットの開発
本研究成果のポイント
・自在な遠隔操作性と器用で繊細な作業性を備えた災害対応重作業ロボットを開発。
・遠隔でロボットを操縦するオペレータが、まるで対象物を触っているかのような反力と触覚を感じながら、精密で確実な作業ができる。
・ロボットの外にカメラを置かずとも、対象物や地形を、視点を変えながら、また、霧がかかっていても見ることができるため、精密な作業や複雑な地形での移動が容易になる。
リリース概要
内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所諭)の一環として、研究開発課題「災害対応建設ロボットの開発」責任者大阪大学大学院工学研究科吉灘裕(よしなだひろし)特任教授(常勤)、神戸大学大学院工学研究科横小路泰義(よここうじやすよし)教授、東北大学未来科学技術共同研究センター永谷圭司(ながたにけいじ)准教授、東北大学大学院情報科学研究科昆陽雅司(こんようまさし)准教授、東京大学大学院工学系研究科山下淳(やましたあつし)准教授、東京工業大学工学院システム制御系田中正行(たなかまさゆき)准教授らは、従来の建設機械と比較して、作業性・機動性を飛躍的に高めた災害対応重作業ロボット(建設ロボット)の実験機 (図1) を開発しました。
このたび本研究開発で開発を進めている主な要素技術を搭載した実験機での一連の評価により、開発コンセプトに描いた建設ロボットの実現に目処が得られました。本実験機は、外観は通常の油圧ショベルですが、従来の建設機械に比較して飛躍的に良好な運動特性と、力覚と触覚の提示機能を付与して、精密で確実な作業の実現を目指しています。また有線給電ドローンによる長時間周辺監視と、任意視点の俯瞰画像生成や霧などを透過して映像を取得する極限画像処理システムを搭載することにより、ロボットの外にカメラを置かずとも、対象物や地形を、視点を変えながら見ることができ、複雑な地形でも容易で安全な移動を可能としました。
今回性能を確認した要素技術以外にも、複数の有用な要素技術の開発を行っています。今後、順次それらの要素技術の評価を進め、より高い作業性、対地適応性の実現を目的として、2重旋回機構と複腕を有する新しいロボットの開発を進めます。
本成果については、平成28年11月11日(金)午前10時より、東北大学で開催されるImPACT公開フィールド評価会にて発表が行われました。

図1 建設ロボット実験機
研究の背景と経緯
土砂崩れや建物の倒壊などの災害対応作業には、多くの場合、建設機械が投入されています。中でも油圧ショベルは、クローラを用いた走行機構がもたらす走破性と、多関節の作業機が可能とする多機能な作業性により、災害現場での中心的な役割を担っています。しかし油圧ショベルは、大きな力で地面を掘削する機械のため、繊細な力のコントロールや微細な作業は得意としていません。このため被災現場の状況によっては現場への投入が困難な場合がありました。また油圧ショベルは、使用している機器の制約から、駆動システムに大きなヒステリシス と0.1~0.2sec程度の無駄な時間があり、様々な制御則、とくにサーボ制御 の織込みは容易ではなく、自在な運動特性を実現することが難しい機械です。
災害対応では、オペレータにも危険が及ぶ状況が予想されるため、遠隔で機械を操作できることが必要です。油圧ショベルには、ラジコンの遠隔操縦装置がオプションとして準備されていますが、多くは100m以内の距離からの直視による遠隔操作であり、災害現場への対応としては十分ではありません。画像伝送を用いた長距離の遠隔操作には、雲仙普賢岳の砂防工事などに用いられた無人化施工システムがありますが、比較的定型的な作業に限定されること、作業性を高めるためには油圧ショベルの周囲に複数のカメラ車を配置する必要があることなど、使用できる状況は限定されています。また遠隔操作時は作業効率が搭乗操作時の60%程度に低下することが大きな課題となっています。
本研究グループは、ImPACTタフ・ロボティクス・チャレンジの共同研究開発の一つのテーマとして、これらの課題を解決した災害対応の重作業ロボットの開発を進めてきました。このたび開発中の要素技術を搭載した実験機 (図1) を用いて、災害現場を模擬した評価試験フィールドにて実証試験を行い、一定の性能が確認されました。
研究の内容
上述の課題を解決する新たな建設ロボットを開発しました。今回開発した建設ロボットによれば、遠隔でロボットを操縦するオペレータが、まるで対象物を触っているかのような反力と触覚を感じながら、精密で確実な作業ができます。また、ロボットの外にカメラを置かなくとも、対象物や地形を、視点を変えながら見ることができ、また、霧がかかっていても見ることができるため、精密な作業や複雑な地形での移動が容易になります。具体的には下記のような要素技術を含んでいます。
(1)新しい油圧システムと制御手法の適用による高い運動制御性の実現(大阪大・吉灘)
油圧ショベルの作業機は非常に大きな慣性質量 があり、また作業機慣性とアクチュエータ(シリンダ)の慣性/トルク比 が、通常の産業ロボットなどよりもはるかに大きいため、これまで高精度に制御することは困難でした。本研究開発では、位置や速度の目標値制御と同時に、シリンダに加わる圧力を適正に高速で制御する制御手法を開発し、大きなオーバーシュート や発振 を生じずに、高応答かつ安定に大慣性の作業機をコントロールすることが可能となりました (図2) 。またこのために、これまでの建設機械に比べて、約10倍の応答速度と精度を有する油圧コンポーネント を用いた新しい油圧システムを構築しました。さらにコンプライアンス制御 を導入することにより、対象物に柔らかく触れることも可能となりました。
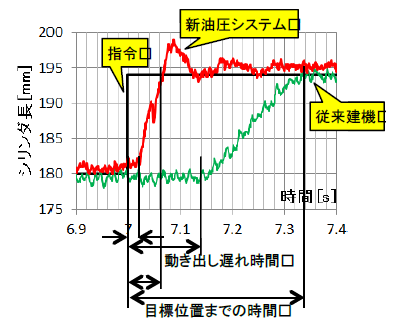
図2 新しい油圧制御システム・制御手法による応答性の例
(2)力覚フィードバック のための建設ロボットの手先負荷力推定(神戸大・横小路)
建設機械のシリンダは、油漏れを嫌うために、多重にシールが組み込まれており、摩擦の非常に大きなアクチュエータです。また建設機械の作業機の関節部は、重負荷や衝撃に対応するためにベアリング等は組み込まれておらず、これも摩擦を大きくする要因となっています。さらに建設機械の作業機では、発生力に対する作業機自重の割合が大きく、先述の摩擦の影響と合わせて、力のコントロールが非常に難しい制御系となっています。本研究開発では、建設ロボットの手先負荷力をシリンダ圧から高精度に推定する手法を開発しました( 図3 、 図4 、 図5 )。シリンダ長の情報を用いて建設ロボットのブームやアームの自重の影響を取り除くことで、精度の高い手先負荷力の推定が可能であり、手先に新たに力覚センサを付加する必要がないので衝撃等にも強く、非常にタフな手先負荷力推定方法です。またシリンダ長の変化速度や加速度情報を用いて動摩擦や慣性力の影響も取り除くことで、さらに高精度な推定も可能です。推定した手先負荷力は、ハプティックデバイス により操縦者へ力覚フィードバックすることができ、作業性が大幅に向上します。今回の実験機では、大阪大学と共同して、バイラテラル制御 を実装しており、操縦者は力覚フィードバックを受けながら直感的な遠隔操縦が可能となりました。
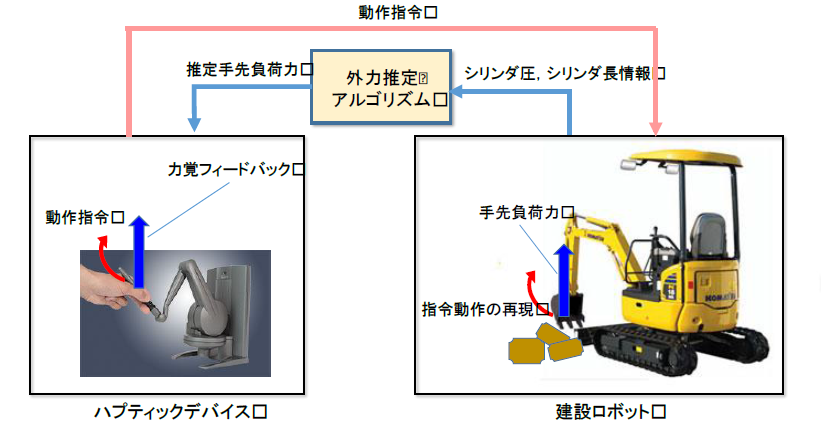
図3 力覚のフィードバックシステム

図4 神戸大の実験機での鉛直押付け実験の様子
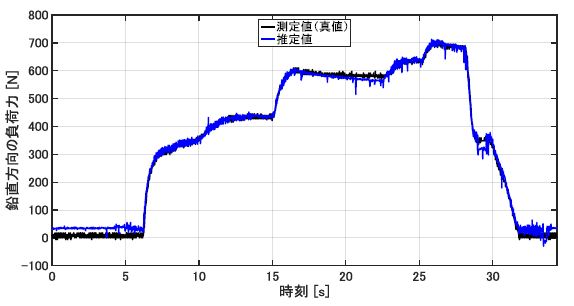
図5 押付け力の推定結果
(3)振動情報を用いた触覚センシング(東北大・昆陽)
触覚は、繊細で安全な作業のために不可欠な情報ですが、建設機械のように大きな衝撃力や外力の加わる機械のエンドエフェクタ部に触覚センサを搭載することは、信頼性・耐久性の観点から現実的ではありませんでした。本研究開発では、エンドエフェクタに発生する高周波の振動を、後方のアーム部に搭載した高感度の振動センサによって計測し、接触に関係する特定の振動成分を抽出し、操縦者に振動刺激として伝達するシステムを開発しています (図6) 。これにより、信頼性・耐久性を心配することなく、建設機械のような大型の機械にも触覚を付与することが可能となりました。振動刺激は、ヒトが感じやすい波形に変調することで、タフ環境でも操縦者に微小な接触情報を見逃すことなく提示することが可能となりました。
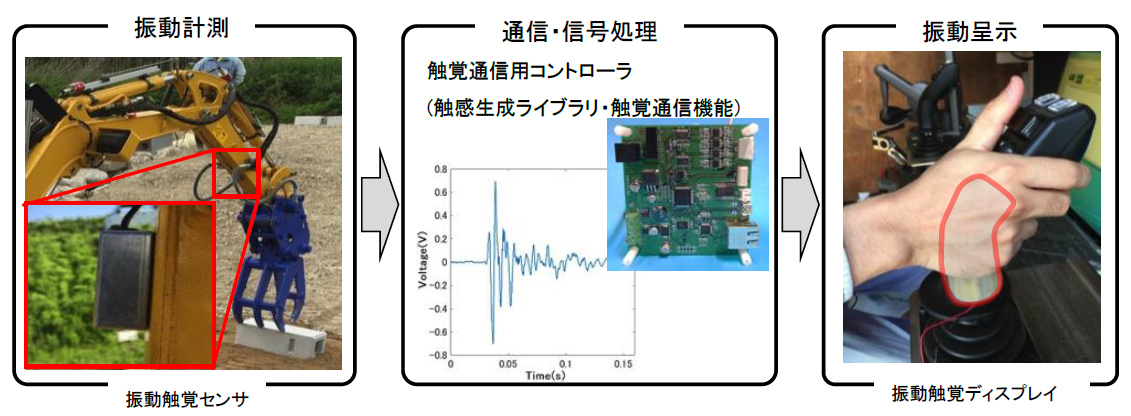
図6 振動情報を用いた接触情報の伝達システムの例
(4)有線給電ドローン (図7) による長時間周辺監視(東北大・永谷)
建設ロボットの遠隔操作を行う際、作業対象を第三者の視点から取得することが、非常に有用です。一般の無人化施工では、カメラ車が第三者視点を提供しますが、発災時の緊急対応では、カメラ車を準備することが困難です。そこで、オペレータに第三者視点を提供するための、マルチロータ機(以下、ドローンと呼ぶ)を利用することとしました。なお、一般のドローンは、バッテリの制約から飛行時間が短いため、本研究では、電線を用いた給電ケーブルにより、送電を行うことで長時間の飛行を実現しました。これにより、オペレータが見たい視点にドローンを飛行させ、その点から画像情報を取得することが可能となります。また、給電ケーブルが環境や建設ロボットに接触し、飛行の安定性を損ねないため、ケーブルの張力を調整する機構を搭載したドローンの着陸台を開発しました。これにより、ドローンの安定した飛行ならびに、確実な離着陸を実現しました。

図7 有線給電ドローン
(5)極限画像処理1 任意視点俯瞰画像の生成(東大・山下)
車体に取り付けた複数のカメラ映像を、画像処理で合成して俯瞰画像取得する方法は、自動車などにも採用されており、運転操作を容易にするものとして知られています。ただし、自動車の例では、俯瞰画像の視点は一点に固定されており、変更することはできません。路上の駐車などの簡単な操作はそれでも十分ですが、災害現場のような複雑な環境下では、固定視点からの俯瞰画像だけでは、安全かつ確実に走行することは困難です。本研究開発では新しい画像処理アルゴリズムを開発して、ロボット本体に搭載した4個の魚眼カメラの映像を合成し、ロボットのオペレータに、任意視点からの俯瞰映像を、リアルタイムに提示することを可能としています (図8) 。また一部のカメラが故障・破損などで映像が取得できなくなっても、時空間データ を活用することにより欠損画像を補完するシステムを開発しました。本システムを用いることにより、災害現場のような複雑な環境下でも、ロボット周囲の状況を分かり易く把握することができ、屋外のタフな環境でのロボットの遠隔操作が可能となりました。

図8 リアルタイムでの任意視点からの俯瞰映像提示例
(6)極限画像処理2 霧などの悪環境下での状況把握(東工大・田中)
ロボットの遠隔操作では、映像情報が非常に重要です。一般には可視光の高解像度カメラをロボットに搭載して周辺の状況把握を行いますが、災害現場では霧の発生等により、可視光カメラでは状況の確認ができないといった場合が想像されます。そこで本研究開発では、波長の長い光を観測できる遠赤外線カメラを活用することにより、状況の観察が困難な霧などの悪環境下でも、周囲状況を把握してロボットを操作できるシステムを開発しました (図9) 。本システムを活用することにより、肉眼や通常の可視光カメラだけでは、対応不可能であった霧のような悪環境であってもロボットの操作が可能となりました。
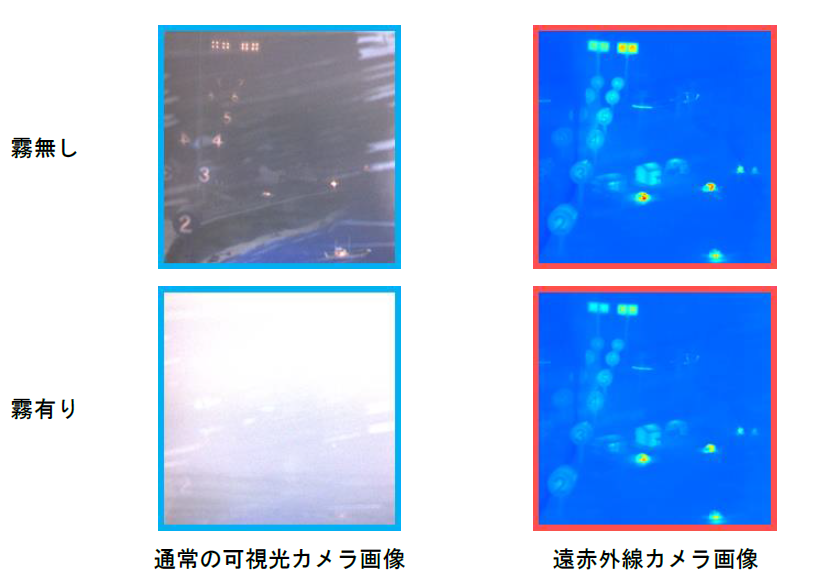
図9 霧の有無における通常の可視光カメラ画像と遠赤外線カメラ画像の例
今後の展開
今回性能を確認した要素技術以外にも、複数の有用な要素技術の開発を行っています。今後、順次それらの要素技術の評価を進めていきます。また、より高い作業性、対地適応性の実現を目的として、2重旋回機構 と複腕を有する新しいロボットの開発を進めており、このロボットに開発した要素技術を統合して搭載する計画です (図10) 。
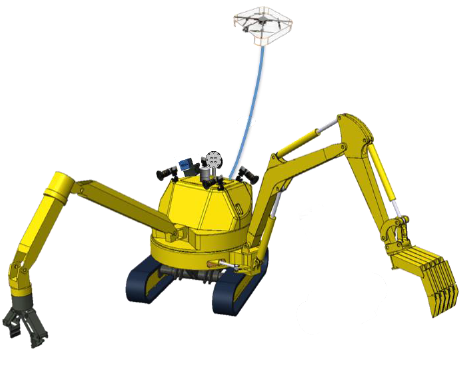
図10 建設ロボット最終コンセプト
田所諭 ImPACTプログラム・マネージャーのコメント
ImPACTタフ・ロボティクス・チャレンジは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要不可欠な、「タフで、へこたれない」さまざまな技術を創りだし、防災における社会的イノベーションとともに、新事業創出による産業的イノベーションを興すことを目的とし、プロジェクト研究開発を推進しています。
無人化施工など、これまでに種々の遠隔操作建設ロボットが開発され、地震災害や福島第一原発事故などで実績を上げてきました。しかしながら、作業効率、精度、行える作業種類などの点で限界があり、原発事故においてすら、作業員が搭乗して操縦しなければならない現場が数多くあったのも事実です。ImPACTで研究開発を進めている建設ロボットでは、油圧システムの精度を飛躍的に高めるとともに、搭乗建設機械を越える視覚情報を操縦者に提供して対象物3次元形状の正確な把握を可能にし、さらには、対象物に触れる際の反力や接触の感覚をあたかも触っているかのようにリアルタイムに伝えることによって、これまでの遠隔操作の問題点を非連続に解決しようとしています。これを実用化することによって、建設ロボットによる災害復旧・対応能力が飛躍的に向上すると期待されます。
特記事項
本成果は、以下の事業・研究プロジェクトによって得られました。
・内閣府 革新的研究開発推進プログラム(ImPACT)
http://www.jst.go.jp/impact/
プログラム・マネージャー:田所諭
研究開発プログラム:タフ・ロボティクス・チャレンジ
研究開発課題:災害対応建設ロボットの開発
研究開発責任者:吉灘裕
研究期間:平成26年度~平成30年度
本研究開発課題では、パワフルさと繊細かつ器用な作業性とを併せ持つ災害対応重作業建設ロボットの開発に取り組んでいます。
参考URL
大阪大学大学院工学研究科 応用理工学科 動力機械システム工学領域 吉灘研究室HP
http://www.jrl.eng.osaka-u.ac.jp/komatsu/Site/Welcome.html
用語説明
- 2重旋回機構
通常の油圧ショベルはひとつの旋回機構しか持たないが、この旋回機構の上にもう一段旋回機構を重ねた構造。今回のプロジェクトのために開発されたものである。
- ヒステリシス
量Aの変化に伴って量Bが変化する際に、Aが増加する時と減少する時で、同じAの値に対するBの値が異なる現象。
- サーボ制御
物体の位置、速度、力などを、任意の目標の変化に追従するように制御する制御法。
- 慣性質量
物体に力を加えると物体は加速運動をするが、加速度の大きさは物体の質量によって異なる。この質量を慣性質量と呼ぶ。
- 慣性/トルク比
ロボットアームなどを制御する際に、アームが持つ慣性質量とそれを駆動するアクチュエータの最大トルクの比。一般にこの値が大きくなるほど制御は困難になる。
- オーバーシュート
位置、速度、力などを制御する際に、それらが目標値を超えて行き過ぎること。
- 発振
位置、速度、力などを制御する際に、それらが制御目標値に収束せずに振動してしまう状態。
- 油圧コンポーネント
ポンプ、バルブなどの油圧システムを構成する機器のこと。
- コンプライアンス制御
ロボットのアームにおいて、アームの位置と力の両方を組み合わせて制御することにより、バネのようなしなやかさを実現する制御法。
- 力覚フィードバック
遠隔地のロボットを操縦したり、バーチャル空間内の物体を操作したりするときに、接触等によって発生した力を操縦者に提示する技術。力覚フィードバックにより、あたかも実物体に触れたかのような感覚を得ることができるので、直感的な操縦(操作)が可能となる。
- ハプティックデバイス
バーチャルリアリティや遠隔操縦において、ユーザー(操縦者)に力覚や触覚を提示する装置の総称。“ハプティック”は、ギリシャ語を語源とする「触覚に関する」という意味を持つ英語の形容詞“haptic”からくる。
- バイラテラル制御
遠隔操縦における制御手法の一種であり、操縦側(マスタ)から遠隔地のロボット(スレーブ)に運動指令を送るだけでなく、遠隔地のロボットから逆に操縦側に力覚情報などを指令値として送り返す双方向(バイラテラル)の制御となっているもの。操縦側から遠隔地のロボット(スレーブ)に運動指令を一方的に送るだけの制御手法をユニラテラル制御と呼ぶ。
- 時空間データ
時刻と場所の情報を付加したデータのこと。ここでは、魚眼カメラを用いて撮影した映像に関して、どの時刻に・どの場所で・どのカメラから撮影した映像であるかを整理してデータ化した動画像のことを指す。