
「まとも」と「へんな」の共存で 未来の建設・鉱山機械を研究
コマツみらい建機協働研究所
コマツみらい建機協働研究所
2006年にスタートした大阪大学とコマツとの共同研究講座をさらに発展させ、より広範囲な領域で強力な産学連携を推し進めるため、両者が共同で2015年に「コマツみらい建機協働研究所」へ改組した。「建設・鉱山機械の遠隔化・自律化」に関する研究では、製品応用化が見込まれるような新技術を生み出したほか、研究者育成にも尽力している。

◎正確な空間認識を実現することで、「遠隔操作」の作業効率を向上

コマツみらい建機協働研究所は、過酷な環境にさらされる鉱山機械のオペレーターを搭乗操作から解放し、鉱山機械が無人で安全かつ効率的に稼動するため、鉱山機械を都市部のオフィスなどから遠隔で自在にコントロールするシステムの構築を目指している。「資源開発の進展により不毛地帯などへき地での鉱山開発が進み、作業時の安全確保や居住インフラに関する整備コストなどが課題となっている。建設・鉱山機械の遠隔化・自律化を達成することで、安全性と経済生産性を高められる」と大畠陽二郎副所長(コマツ)。
しかし、現在の操作システムでは、実際の搭乗操作と比較して作業効率が約50〜60%も低下する。建設機械の操作には正確な空間認識が必要だが、「遠隔操作は視覚情報が制限される。そこで、自身や対象物が移動することによる見え方の変化『運動視差』に着目し、奥行きが正しく再現された立体画像を遠隔操作システムに導入し、作業効率を検証しています」
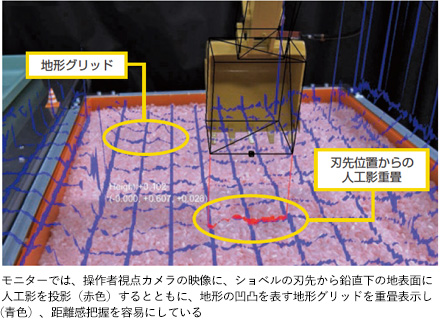
また、実画像と作業場周辺の地形の三次元情報を表示(重ね合わせて表示)することで、「二次元映像(平面図)であっても、地形の凹凸や遠近感を把握できるシステムを開発しました。重畳表示がない場合と比較して遠近誤差が低減する効果が見られました」。この遠近感補強システムは研究を完了し、次のステップの製品応用のための検討を進めている。
◎カメラをナビゲーションのセンサーに最小限の事前情報で「自律走行」
自律走行に関しては「カメラ画像を用いた走行制御」と「事前情報の少ないナビゲーション」を追究。乗用車などに導入されているGPS(全地球測位システム)による位置計測は、過酷な環境下では計測不能に陥る恐れがあるため、本研究ではカメラを屋外ナビゲーションのセンサーにした。「模索しているのは『しばらく道なりに進んで、この交差点を曲がる』といった口頭での道案内のようなナビゲーション。詳細な地図は内蔵していませんが、記憶しているシーンが現れると、そこで次の行動を考えるという人間の感覚に近いシステムで、事前情報が少なくても環境が変化していても対応して走行できます」と大須賀公一所長。実現すれば、次世代の自律走行技術の基盤技術となる。
◎ 企業性と学術性の二重構造性が 、未来に役立つアイデアを生む

2018年度からは、ユニークな構想がスタートする。大須賀所長は「協働研究所には、実用的な研究を目的とする企業性と好奇心駆動型で未知のものを追及する学術性が混在している。その二重構造性を生かすためには、社会ですぐに役立つ研究と、ぶっ飛んだ研究が混在しないといけない。そこに『コマツみらい建機協働研究所』の存在意義があるのだと思っています」と話す。
そこで、従来の「まとも」な研究に加えて、他がまねできない研究に取り組む〝コマツへんな建機協働研究所〟を稼働させる。現在、工学部応用理工学科機械工学科目・工学研究科機械工学専攻の学生4人を含む研究スタッフが「未来の、へんな建機」のアイデアを考え、イラストをもとに議論している。「建機という分野に限れば何を考えても良い。自由な発想の中に、きっと実現可能なアイデアがあるはず。大阪大学とコマツの長い共同研究の歴史があってこそ認めてもらえるチャレンジで、『あそこの研究所は次々に変な建機を造っているな』と言われたい」と、楽しくて仕方がないという表情で締めくくった。
■ 協働研究所
企業の研究組織を大阪大学内に誘致、多面的な産学協働活動を展開する産学連携の仕組み。社会の発展に資する学問領域の研究拠点を産業界と共同して大学内に長期的に確保・協働することにより、大阪大学における研究成果の産業界への活用促進、研究の高度化及び高度人材育成の充実を図る。
未知の世界に挑む研究者の物語 『究みのStoryZ』 に戻る
阪大生と卒業生の物語 『阪大StoryZ』 に戻る
(2018年2月取材)