
Designing minimal and scalable insect-inspired multi-locomotion millirobots
An international research team constructed insect-size millirobots with the ability to fling themselves into the air like trap-jaw ants
Over millions of years of evolution, insects have developed a wide array of impressive adaptations, some of which that they can wield in new and surprising ways. For example, trap-jaw ants have powerful, spring-loaded mouthparts that can snap shut at over 200 kph. This makes the mandibles among the fastest moving body parts in nature. Besides their fearsome chomping ability, trap-jaw ants have discovered that, by pushing with their hind legs while simultaneously “biting” the ground, an ant can send itself hurtling through the air to escape a predator or a deep pit. This innovative form of locomotion turns out to be very energy efficient, even when compared with sophisticated human-designed machines.
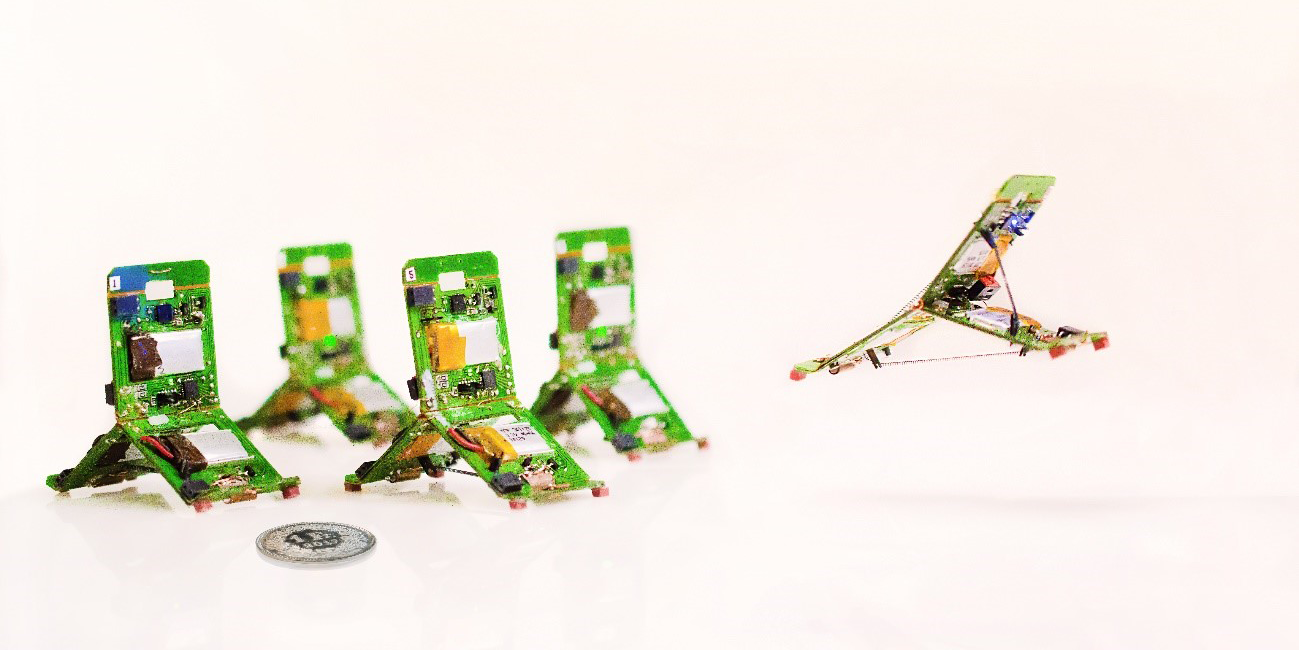
Now, Koh Hosoda at the Adaptive Robotics Laboratory, Osaka University together with his colleagues at Swiss Federal Institute of Technology Lausanne took inspiration from the trap-jaw ants to construct cooperative origami millirobots. Called “Tribots,” these insect-sized, upside-down “Y”-shaped machines can crawl, leap, and even summersault over obstructions. The “muscles” of the Tribots are spring-like linear shape-memory alloy actuators. The hinge mechanism allows the robots to jump over previously impassible areas.
“The integrated design of the actuators and surface-mounted electronics enables us to miniaturize the robots,” emphasize the authors. The team measured the mechanical power and energy “cost of transport,” and found that Tribots surpassed the heavier jumping robots currently available.
Groups of Tribots can coordinate to accomplish tasks using division of labor. For example, one Tribot designated as the leader can command two others to move a box. This technology can be used to build scalable “colonies” of autonomous robots that might explore the surfaces of new planets.
“The ability to move over diverse terrain while accomplishing coordinated tasks sets these robots apart from currently available rovers,” say the authors. “Here on Earth, Tribots might be deployed for search-and-rescue missions in the wake of natural disasters like floods or earthquakes.”

Fig. Multi-locomotion millirobots inspired from trap-jaw ants (c) Ahenishbek Zhakypov
The article, “Designing minimal and scalable insect-inspired multi-locomotion millirobots” was published in Nature at DOI: https://doi.org/10.1038/s41586-019-1388-8 .
Related links