

新型子供アンドロイドの表情変化の作り分けに成功
アンドロイドの表情にニュアンスをつける新技術
研究成果のポイント
・子供アンドロイドAffetto(アフェット)の頭部後継機を新たに開発(今回初披露)、これまで印象面での評価に留まっていたアンドロイドの機械的性能を定量的に評価し、その表情の変化を高い精度で作り分けることに成功した世界で初めての成果。
・アンドロイドの顔の表面で生じる変形は複雑であるため、これまで表情は大まかにしか作り分けられていなかった。
・ぱっと開く笑顔や恐る恐る出す笑顔など、動きにニュアンスを含んだ生き生きとした表情をアンドロイドで表現できることで、アンドロイドが潜在的に備える豊かな表現力をより高いレベルで引き出せるようになる。
概要
大阪大学大学院工学研究科の石原尚助教及び浅田稔教授(創発ロボティクス研究室)らの研究グループは、子供型のアンドロイドロボットの頭部を新たに開発し、その表情の変化を高い精度で作り分けることに成功しました。本研究グループは、人とロボットの触れ合いの中で豊かな情報が交わされ、その触れ合い情報を利活用できる社会の実現を目指して、子供型アンドロイドAffetto(アフェット)の開発を進めてきました。今回初披露となる頭部 (図1) は、2011年に発表した頭部の後継機として株式会社エーラボの技術協力を受けて開発したものです。見た目の質感だけでなく、内部機構の自由度数や動きの再現性の点でも性能が向上しています。
アンドロイドの表情は、柔らかい顔被覆の内部に搭載された機構の動きを操ることで作り出されます。これまでは、顔表面の変形の特性が調べられていなかったため、変形の作り分けは大まかにしか実現されていませんでした。
今回、石原助教らの研究グループは、内部機構の動きに伴う顔表面の動きを精密に計測し、表面の操りやすさと変形の特性を機構毎に評価しました。そして、笑顔の表現に最も適した3つの機構それぞれに対して表面の変形の特性を考慮に入れた制御器を設けることで、無表情から笑顔に至る5パターンの表情の変化を作り分けることに成功しました。この成果により、ぱっと開く笑顔や恐る恐る出す笑顔など、ニュアンスを含んだ生き生きとした表情をアンドロイドで表現できるようになることが期待されます。
本研究成果は、国際論文誌「Frontiers in Robotics and AI」に、2018年10月23日(日本時間)に公開されました。
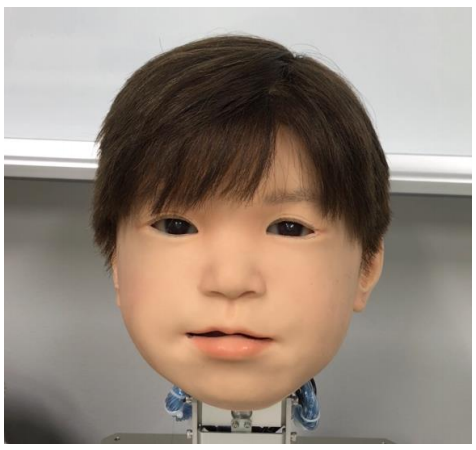
図1 子供型アンドロイドロボットの新型の頭部
研究の背景
これまで、アンドロイドロボットの表情は変形後の最終的な形の違いによって作り分けられてきました。しかし、例えば最終的に同じ笑顔の表情に至る場合でも、一定の速さの変化もあれば、ある程度までは早く、その後遅くなる変化など、様々な変化の過程があり得ます。これまでのアンドロイドでは表面の変形を精密に操ることができなかったために、このような変化の過程にニュアンスを載せて表情に幅を持たせることができないという課題がありました。
石原助教らの研究グループでは、アンドロイドの顔表面に多数の三次元位置計測(モーションキャプチャ)用マーカを貼り付け、各内部機構の動きに伴う表面の動きを精密に計測し、表面の操りやすさと変形の特性を機構毎に評価しました。そして、笑顔の表現に適した機構の内、最も操りやすい3つの機構を選別し、各機構に対して表面の変形の特性を考慮に入れた制御器を設けることで、無表情から笑顔に至る5パターンの表情の変化を作り分けることに成功しました。
本研究成果が社会に与える影響(本研究成果の意義)
本研究成果により、ぱっと開く笑顔や恐る恐る出す笑顔など、ニュアンスを含んだ生き生きとした表情をアンドロイドで表現できるようになることで、アンドロイドロボットの表現力が飛躍的に向上することが期待されます。また、このようなニュアンスが人にどのように伝わり、またコミュニケーションをいかに変えるかを調べる研究が可能になります。このような研究によって、コミュニケーションロボットが状況に応じてより効果的な情報を、より豊かに人と交わすことができるようになると期待されます。
特記事項
本研究成果は、2018年10月23日(日本時間)に国際論文誌「Frontiers in Robotics and AI」(オンライン)に掲載されました。
タイトル:“Identification and evaluation of the face system of a child android robot Affetto for surface motion design”
著者名:Hisashi Ishihara, Binyi Wu, and Minoru Asada
DOI:10.3389/frobt.2018.00119
なお、本研究は、科学技術振興機構(JST)戦略的創造研究推進事業(さきがけ)「新しい社会システムデザインに向けた情報基盤技術の創出(研究総括:黒橋禎夫)」における研究課題「触れ合いデータを収集する子供アンドロイド高機能化(課題番号JPMJPR1652)」及び日本学術振興会(JSPS)科学研究費助成事業特別推進研究「神経ダイナミクスから社会的相互作用に至る過程の理解と構築による構成的発達科学(課題番号24000012)」の一環として行われ、株式会社エーラボ(東京都千代田区)の技術協力を得て行われました。
研究者のコメント
アンドロイドの見た目の質感は向上してきているものの、その動きを操る技術には課題だらけです。ハードウェアを十分使いこなすことができていないため、効果的に改良を進めていくことが難しい状況です。この原因の一つは、アンドロイドロボットを特徴付ける、人の皮膚のような柔らかい表面被覆の構造的不安定さにあります。今回の研究は、この不安定さを評価することによって、操る技術を向上させ、効果的な改良に結び付けようとするものです。
参考URL
大阪大学 大学院工学研究科 石原尚助教
http://www.ams.eng.osaka-u.ac.jp/user/ishihara/